|
Вращение ручки |
Давление цилиндра |
Z плунжер |
Для балансировки поворачивайте ручку |
|
По часовой стрелке |
увеличивается |
Задвигается (вверх) легче |
Против часовой стрелки |
|
Против часовой стрелки |
уменьшается |
Выдвигается (вниз) легче |
По часовой стрелке |
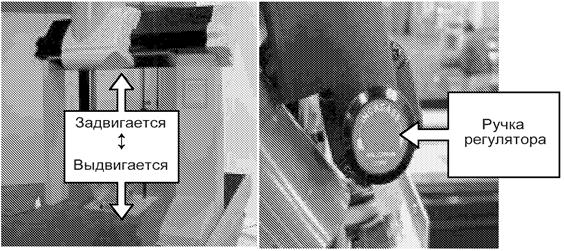
Теперь давление цилиндра-противовеса установлено. Затяните блокировочную гайку на стержне регулятора.
Имеются три типа температурной компенсации: Ручная, Линейная и A.C.T.I.V. (адаптивных поправок на влияющие колебания температуры). Каждая их них описана ниже. Любое изменение температуры в помещении, где находится КИМ, изменяет геометрию, как структуры машины, так и детали. Целью любой системы температурной компенсации является уменьшение погрешностей, обусловленных изменением температуры и влияющих на результат измерения.
Ручная система температурной компенсации является наиболее распространенной. Оператор КИМ вручную вводит комнатную температуру при выдаче компьютером такой подсказки. Значения коррекций определяются на основании введенной температуры. Такая система довольно субъективна из-за неопределенного метода замера температуры помещения. Температурная компенсация будет настолько точна, насколько точна температура, введенная в систему. Если в компьютер вводится 38,5°С, хотя в действительности она 37,5°С, температурная компенсация будет неточной из-за неправильной температуры введенной оператором.
При использовании Линейной системы температурной компенсации измерение, обусловленное изменением температуры, осуществляется по длине шкал, установленных на КИМ. Наблюдение за изменением длины шкалы является отличным способом для точной корректировки на колебания комнатной температуры. Способность данной системы выполнять коррекции на температуру ограничена лишь при существенных колебаниях температуры в помещении. Линейная система температурной компенсации наиболее походит для рабочих помещений с относительно устойчивыми температурными условиями. При использование КИМ в помещениях, где вероятность существенных колебаний температуры велика, наилучшей системой может служить система A.C.T.I.V., описанная на следующей странице.
Система адаптивных поправок на влияющие колебания температуры (A.C.T.I.V.) является структурной системой поправок на температуру, которая обеспечивает точную работу машины в тяжёлых условиях. A.C.T.I.V. использует терморезисторы, установленные в различных местах КИМ. Терморезисторы - это резисторы, изменение сопротивления которых базируется на температуре. Чем выше температура, тем ниже сопротивление и, наоборот, чем ниже температура, тем выше сопротивление. Терморезисторы широко используются в настоящее время во многих отраслях промышленности. Наиболее распространенное использование – это в качестве части систем управления двигателями, применяемых практически в каждом производимом сейчас двигателе. При использовании уточненной модели параметрических поправок, любые колебания в геометрии машин вычисляются точно на основе показаний терморезисторов. В показания шкалы машины затем вносятся поправки на отклонения.
Параметрическая температурная модель может использоваться при однородных изменениях температуры, пространственных колебаниях температуры, а также динамичных изменениях температуры (во времени).
Сбор данных машиной КИМ осуществляется при соприкосновении детали и щупа, прикрепленного к измерительной оси машины.
Для КИМ существует много типов щупов. Стандартный щуп, поставляемый с машиной КИМ, можно заменять на другие, в зависимости от конфигурации машины.
Так как щупы имеют различные уровни повторяемости, что влияет на точность системы, точность машины, к которой прикреплен щуп, является определяющим фактором в общей точности. Имеется и ряд других факторов, влияющих на точность системы, в том числе и профессионализм оператора машины.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.