поперечных сечений стержней и их конструкционный материал. В преде- лах каждого стержня геометрические характеристики поперечного сечения считаются постоянными. Способность произвольного стержня рамы со- противляться изгибным деформациям будем описывать величиной погон- ной жесткости
(EI )
![]() i = j
i = j
j
|
На раму действуют произвольная нагрузка. Заданная конструкция считается линейно деформируемой системой.
11.1.3.Основная система и канонические уравнения
В основе расчета рам методом перемещений лежит переход от за- данной кинематически неопределимой системы к расчету эквивалентной кинематически определимой системе. Эквивалентность двух систем должна состоять в одинаковости перемещений (кинематическая эквивалент- ность метода перемещений) и одинаковости внутренних усилий (стати- ческая эквивалентность метода перемещений). Такая эквивалентная система и называется основной системой метода перемещений.
Для получения основной системы из заданной на узлы рамы накла- дываются дополнительные связи, которые исключают возможность воз- никновения угловых и линейных перемещений ее узлов (рис. 11.4).
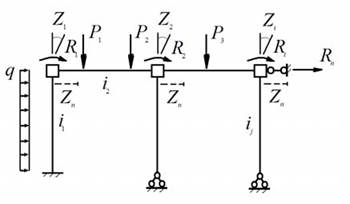
Рис. 11.4
Для исключения угловых перемещений на все жесткие узлы накладываются связи, исключающие их повороты. Такие связи для краткости будем на- зывать «шайбами» и изображать в виде квадрата, окаймляющего жесткий узел. Для исключения линейных перемещений на узлы по направлению этих перемещений накладываются стержни. Преобразованная таким обра-
зом система состоит из отдельных статически неопределимых балок, в ней отсутствуют все узловые перемещения и, следовательно, она является ки- нематически определимой системой.
Кинематическая эквивалентность полученной кинематически оп- ределимой системы заданной системе достигается приложением к ней в качестве дополнительных внешних воздействий неизвестных узловых пе-
ремещений
Z1 ,...,Zn
(рис. 11.4). При дальнейшем расчете эти перемещения
подлежат первоочередному определению и поэтому они называются ос- новными неизвестными метода перемещений. И, поскольку, основные неизвестные являются перемещениями, то они имеют кинематическую природу.
Для достижения статической эквивалентности двух систем вводятся условия обращения в ноль реакций (рис. 11.4)
R1 = 0,...,Rn = 0 , (11.1)
возникающих в кинематически определимой системе в наложенных связях по направлению основных неизвестных. И так как эти реакции порожда- ются основными неизвестными и заданной внешней нагрузкой, то они являются функциям этих величин и условия (11.1) можно записать в сле- дующем виде
R (Z,...,Z
,P ) = 0,
1 1 n
..............................
(11.2)
R (Z,...,Z
,P ) = 0.
n1 n
Поскольку заданная стержневая конструкция считается линейно деформируемой системой, то дополнительные условия (11.2), согласно принципу суперпозиции, принимают вид
|
|
|
+ R1P = 0,
.....................................
(11.3)
|
+ ...+ RnZ
+ RnP = 0.
Входящие в (11.3) величины имеют следующий смысл:
|
(i , j = 1,...,n) -
реакция в наложенной связи основной системы по направлению основного
неизвестного № i, вызванная действием основного неизвестного
Z j ;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.