![]() - вектор
силы
- вектор
силы ![]() на плане
сил, мм.
на плане
сил, мм.
Значение векторов сил для звена 5 поместим в таблицу 7.
Таблица 7 – Значение сил и их векторов на плане сил
|
Силы |
|
|
|
|
Рi, Н |
314 |
4576 |
732 |
|
|
14 |
200 |
32 |
Величина неизвестной реакции:
![]()
Определим
точку приложения реакции ![]() . Составим
уравнение моментов сил звена 5 относительно точки S4
. Составим
уравнение моментов сил звена 5 относительно точки S4
![]() .
.
![]()
где h – плечо силы R50относительно точки s4.


Рассмотрим группу 2-3
Составим
векторное уравнение сил: ![]()
![]()
Найдем
реакцию ![]() .
. ![]()
![]() , где Rτ21 –
касательная составляющая реакции 1-го звена на звено 2;
, где Rτ21 –
касательная составляющая реакции 1-го звена на звено 2;
hРИ2, hG2, AС – плечи сил снятые с чертежа, мм.

Rn21и R30 определим графически из плана сил.
Определим масштабный коэффициент для группы 2-3:
где
![]() -
масштабный коэффициент плана сил группы 2-3,
-
масштабный коэффициент плана сил группы 2-3, ![]() ;
;
![]() - вектор
силы
- вектор
силы ![]() на плане
сил, мм.
на плане
сил, мм.
Значение векторов сил для группы 3-2 поместим в таблицу 8.
Таблица 8 – Значение сил и их векторов на плане сил
|
Силы |
|
|
|
|
|
|
|
Рi, Н |
8280 |
176 |
6080 |
98 |
6017 |
8054 |
|
|
52 |
1 |
38 |
1 |
37 |
50 |
Последовательно по векторному уравнению откладываем вектора сил. Неизвестные реакции определим графически:
![]()
![]()
Для
нахождения ![]() составим
уравнение сил для 3-го звена
составим
уравнение сил для 3-го звена ![]()
![]()
Масштабный коэффициент плана сил 3-го звена:
где
![]() -
масштабный коэффициент плана сил звена 3,
-
масштабный коэффициент плана сил звена 3, ![]() ;
;
![]() - вектор
силы
- вектор
силы ![]() на плане
сил, мм.
на плане
сил, мм.
Значение векторов сил для звена 3 поместим в таблицу 9.
Таблица 9 – Значение сил и их векторов на плане сил
|
Силы |
|
|
|
|
Рi, Н |
98 |
6080 |
56539 |
|
|
1 |
38 |
351 |
Величина неизвестной реакции:
![]()
Определим
точку приложения реакции ![]() . Составим
уравнение моментов сил звена 3 относительно точки S2
. Составим
уравнение моментов сил звена 3 относительно точки S2
![]() .
.
![]()
где h – плечо силы R30относительно точки s2.


Рассмотрим начальный механизм 0-1
Составим
уравнение моментов, из которого определим уравновешивающую силу ![]()
![]()

Реакцию
R10определим
графически из условия ![]()
![]()
Масштабный коэффициент плана сил начального механизма:
где
![]() - вектор
силы R12на
плане сил, мм.
- вектор
силы R12на
плане сил, мм.
Строим план сил и определяем неизвестную реакцию
![]()
Определяем уравновешивающий момент МУ по формуле:
![]()
3.5 Определение уравновешивающей силы по методу Жуковского.
Заменим моменты инерции, действующие на звенья, парами сил


Вычерчиваем повернутый на 90˚ план скоростей и прикладываем к нему все действующие на механизм силы, сохраняя их направления. Составим уравнение равновесия для всех сил относительно полюса
![]()
![]()


где pa, ps2, hG2, hPи2, pb, ps4, pd, hPи4, hG4– плечисил, мм.
Pуж– уравновешивающая сила, определенная по методу Жуковского, Н


![]()
Уравновешивающий момент Mуж
![]()
Погрешность двух методов составляет:

4. ПРОЕКТИРОВАНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ ПЛАНЕТАРНОГО РЕДУКТОРА. РАСЧЕТ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
4.1 Расчет планетарного редуктора
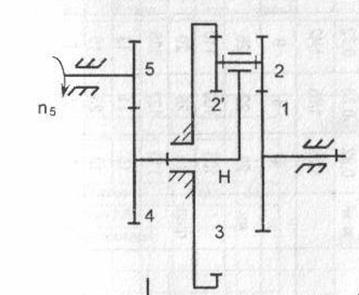
Рисунок 7 – Схема передаточного зубчатого механизма
1-Опорное центральное колесо, 2-2` -Блок сателлитов; 3- Центральное опорное колесо; 4,5-Зубчатые колёса рядовой передачи;
Для
проектирования передаточного зубчатого механизма нам заданы следующие
параметры: модуль зацепления m=8 мм число
зубьев колес Z4=19,
Z5=13,
передаточное отношение механизма ![]() .
.
Передаточное отношение механизма:
![]()
где
![]() -
передаточное отношение планетарной передачи;
-
передаточное отношение планетарной передачи;
![]() -
передаточное отношение рядовой передачи;
-
передаточное отношение рядовой передачи;
![]() ,
,
Знак минуса передаточного отношения показывает, что колёса 4 и 5 вращаются в разные стороны.
Для
определения ![]() через числа
зубьев планетарного механизма используем выражение:
через числа
зубьев планетарного механизма используем выражение:
 , где
, где
![]() – числа
зубьев колес планетарной передачи.
– числа
зубьев колес планетарной передачи.
Условие соосности:
![]() ,
,
Исходя из выше изложенного, находим соотношение чисел зубьев:

Заменяем
![]()
где
a,b – коэффициенты, на которые домножим![]() для
выполнения условий.
для
выполнения условий.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.