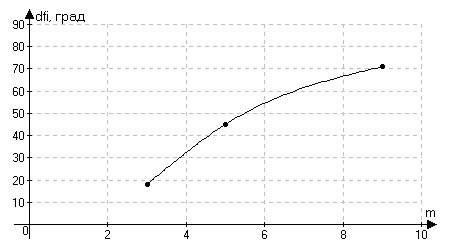
Рис. 4.3.7. Зависимость величины фазового сдвига от m.
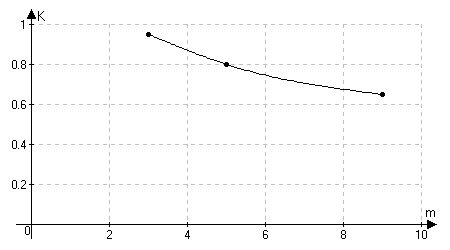
Рис. 4.3.8. Зависимость КФ сдвига от m.
Интересно отметить то, что с ростом величины корректирующего коэффициента
уменьшается максимальное значение выходного сигнала. Это объясняется тем, что фильтр
приближается по своему характеру к фильтру с бесконечной памятью.
Также отметим, что имеющийся сдвиг по фазе выходного сигнала относительно
входного растет пропорционально величине m аналогично фильтру с постоянным
коэффициентом коррекции.
Рассмотрим, как изменится результат при изменении периода дискретизации T0.
Таблица 4.3.4. Параметры фильтра при различных значениях периода дискретизации
(m = 5, X0 = 0, A = 1 В).
|
T0, мс |
Δφ, градусов |
|Uмакс|, В |
КФ |
|
20 |
5 |
1,00 |
1,00 |
|
50 |
18 |
0,95 |
0,95 |
|
100 |
45 |
0,8 |
0,8 |
То есть для фильтра с конечной памятью уменьшение периода дискретизации
аналогично уменьшению m приводит к росту реактивности системы.
Исследуем реакцию фильтра на зашумленный сигнал. 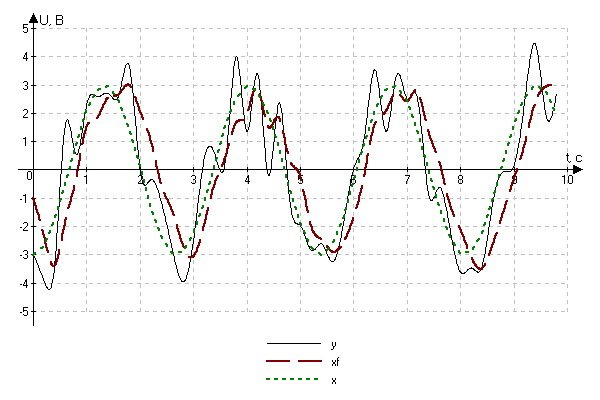
Рис. 4.3.9. Цифровая фильтрация сигнала при m = 3, X0 = 0.
Теперь рассмотрим зависимость качества фильтрации при поданном на вход фильтра сигнале вида «белый шум».
Таблица 4.3.5. Параметры фильтра при различных значениях корректирующего коэффициента.
|
m |
Z1 |
Z2 |
Z3 |
Zсредн |
|
3 |
3,8352 |
2,9375 |
3,3248 |
3,365833 |
|
5 |
6,2701 |
4,8417 |
5,2308 |
5,447533 |
|
9 |
10,2407 |
8,7723 |
6,3784 |
8,4638 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.