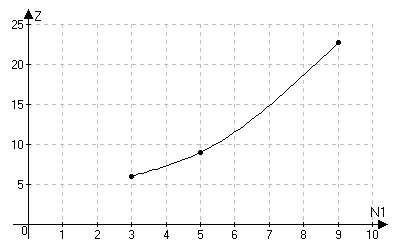
Рис.4.2.10. Зависимость Z = f(N1).
Как и ожидалось, увеличение длины памяти фильтра улучшает качество фильтрации.
4.3. Рекуррентный алгоритм усреднения с конечной памятью
Будем подавать на вход фильтра постоянный по величине входной сигнал Y = 1 В. Исследуем зависимость выходного сигнала фильтра от величины длины наблюдаемой выборки m.
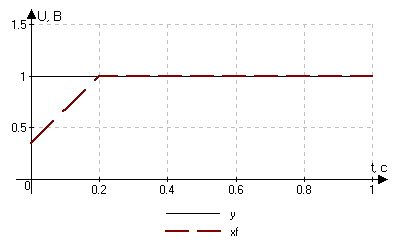
Рис. 4.3.1. Цифровая фильтрация сигнала при m = 3, X0 = 0.
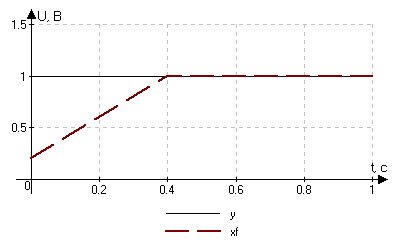
Рис. 4.3.2. Цифровая фильтрация сигнала при m = 5, X0 = 0.
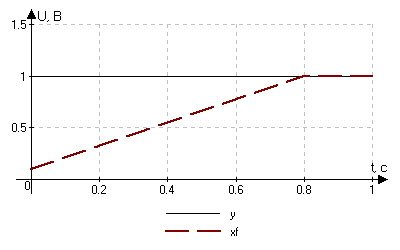
Рис. 4.3.3. Цифровая фильтрация сигнала при m = 9, X0 = 0.
Таблица 4.3.1. Параметры фильтра при различных значениях корректирующего коэффициента.
|
m |
T = tп.п., с |
|
3 |
0,2 |
|
5 |
0,4 |
|
9 |
0,8 |
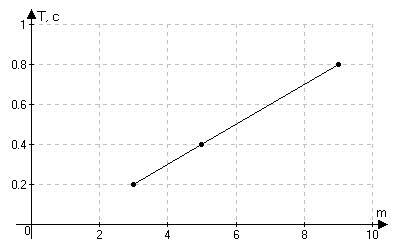
Рис. 4.3.4. Зависимость Т = f(m).
Здесь под T понимаем время, которое необходимо для получения установившегося
значения. Отметим увеличение T при увеличении m, что связано с большим влиянием
предыстории на результат.
Таблица 4.3.2. Параметры фильтра при различных значениях периода дискретизации (m = 5).
|
T0, мс |
T = tп.п., с |
|
20 |
0,09 |
|
50 |
0,2 |
|
100 |
0,4 |
Отметим увеличение tп.п. при увеличении T0.
Подадим на вход фильтра зашумленный постоянный сигнал:
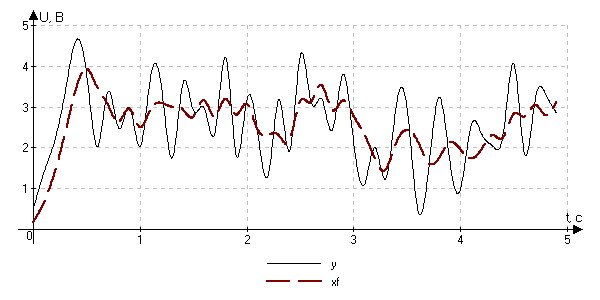
Рис. 4.3.5. Цифровая фильтрация сигнала при m = 3, X0 = 0, X = 2,6 В.
Реакция этого фильтра на зашумленный постоянный сигнал, в общем, такая же, как и фильтра с постоянным коэффициентом коррекции.
Подадим на вход фильтра синусоидальный сигнал.
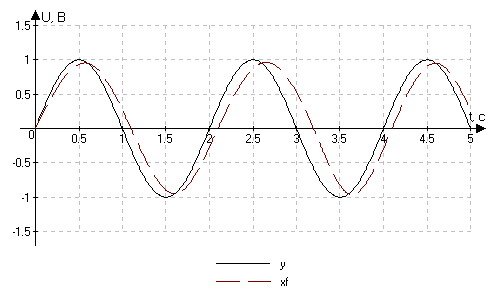
Рис. 4.3.6. Цифровая фильтрация сигнала при m = 3, X0 = 0.
Таблица 4.3.3. Параметры фильтра при различных значениях корректирующего коэффициента.
|
m |
Δφ, градусов |
|Uмакс|, В |
КФ |
|
3 |
18 |
0,95 |
0,95 |
|
5 |
45 |
0,8 |
0,8 |
|
9 |
81 |
0,65 |
0,65 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.