3.2 Входные преобразователи
массу, воспринимающую ускорение. Ток I можно преобразовать в выходное напряжение V0 с помощью резистора R.
В преобразователе такого типа входная величина автоматически компенсируется внутренней величиной с помощью цепи отрицательной обратной связи, поэтому его часто называют компенсационным датчиком.
Входной диапазон большинства преобразователей мал, динамический диапазон часто не превышает величины 3—10. Для тех случаев, где этого недостаточно, можно объединить вместе несколько преобразователей, имеющих различные входные диапазоны, с целью обеспечить более широкий входной диапазон. При превышении измеряемой величиной входного диапазона одного преобразователя вступает в действие следующий преобразователь. В такой «релейной конструкции» все преобразователи должны иметь одинаковую чувствительность, иначе общая передаточная характеристика становится разрывной. Кроме того, отдельные преобразователи должны очень хорошо выдерживать перегрузки по входу.
Наконец, часто проблемой является надежность преобразователя. Иногда это решается путем применения нескольких преобразователей, вместе измеряющих одну и ту же величину. Поскольку между выходными сигналами преобразователей остаются различия в некотором заданном допустимом интервале, окончательным результатом измерения является среднее значение отдельных выходных сигналов. Если, однако, один из выходов существенно отличается от остальных, то сигнал соответствующего преобразователя исключается из выходного сигнала. При использовании п преобразователей, до n — 2 из них могут быть повреждены, прежде чем система действительно становится непригодной. Такая «дублирующая конструкция» значительно улучшает надежность системы, увеличивая, конечно, стоимость.
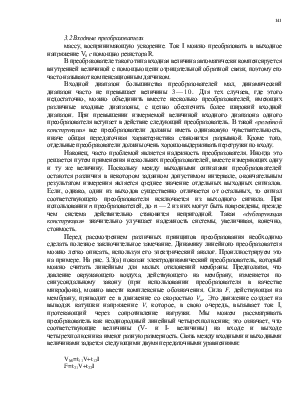
Перед рассмотрением различных принципов преобразования необходимо сделать полезное заключительное замечание. Динамику линейного преобразователя можно легко описать, используя его электрический аналог. Проиллюстрируем это на примере. На рис. З.З(а) показан электродинамический преобразователь, который можно считать линейным для малых отклонений мембраны. Предполагая, что давление окружающего воздуха, действующего на мембрану, изменяется по синусоидальному закону (при использовании преобразователя в качестве микрофона), можно ввести комплексные обозначения. Сила F, действующая на мембрану, приводит ее в движение со скоростью Vm. Это движение создает на выводах катушки напряжение V, которое, в свою очередь, вызывает ток I, протекающий через сопротивление нагрузки. Мы можем рассматривать преобразователь как неоднородный линейный четырехполюсник; это означает, что соответствующие величины (V- и I- величины) на входе и выходе четырехполюсника имеют разную размерность. Связь между входными и выходными величинами задается следующими двумя передаточными уравнениями:
VM=t11V+t12I
F=t21V+t22I
Измерительные приборы в электрических измерениях
|
|
Рис 3 3. (а) Электродинамический преобразователь. (b) Линейный неоднородный четырехполюсник — аналог преобразователя (а), (с) Трехкаскадный четырехполюсник, (d) Электрический аналог преобразователя (а).
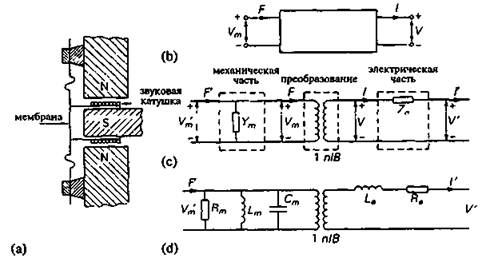
Предположим на время, что преобразователь идеальный, а именно, что у катушки нет электрического сопротивления, емкости и самоиндукции, а мембрана абсолютно гибкая и не имеет массы и трения. Применяя к катушке, находящейся в постоянном магнитном поле с индукцией В закон об электромагнитной индукции Фарадея, получаем: V = nlBVm, где п — число витков, а l — длина одного витка. Сила Лоренца, действующая на катушку, равна F = nlBI, поэтому
Поскольку определитель этой матрицы равен единице, преобразователь должен быть обратимым.
Его можно использовать как входной преобразователь (микрофон), а также наоборот, в качестве выходного преобразователя (громкоговоритель). Если этот датчик используется как входной преобразователь и к его катушке не подключена нагрузка, то выходное напряжение будет пропорционально скорости движения мембраны. Если этот преобразователь, используемый как выходной, возбуждается некоторым током, а мембрана удерживается неподвижной, так что скоростью можно пренебречь, то сила, действующая на поверхность мембраны, будет пропорциональна току (см. также рис. 3.2.(b))
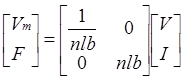
Очевидно, что мы можем рассматривать этот идеальный пассивный преобразователь как трансформатор, преобразующий размерность входной величины в соответствующую размерность выходной величины. Коэффициент передачи этого преобразователя размерности равен 1: nlB. Согласно рис. З.З(с) и учитывая импеданс катушки Ze , получаем:
3.2 Входные преобразователи
Даже если к катушке не подключено сопротивление нагрузки, она будет все-таки оказывать определенное воздействие на мембрану, придавая ей некоторую скорость, что вызвано механическим импедансом Zm подвижной части преобразователя. С учетом этого можно записать: Ym =1/Zm =V'm/F', когда
I' = 0 .
Этот пример демонстрирует один из недостатков V- и I-величин. Механический импеданс равен обратной величине отношения V к I (см. также приложение А.4). Это связано с внесистемным выбором импеданса в механике.
Поэтому переход от Vm ,F к V'm ,F ’ задается равенством:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.