Формирователь обеспечивает ПИ закон регулирования мощности. Его автоматическое включение происходит при переходе в режим «Мощность».
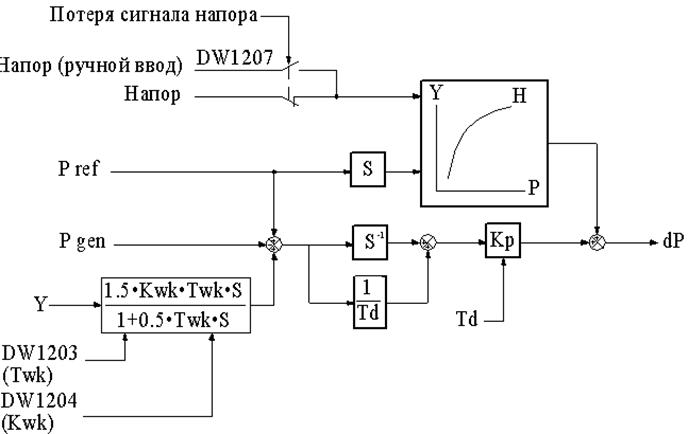
Рисунок 7 – ПИ-формирователь регулирования мощности
На рисунке 7 приняты следующие обозначения: Kwk – коэффициент пропорциональной составляющей компенсации гидроудара; Twk = Tw/2; Tw – постоянная времени водовода; Pgen – активная мощность генератора; Н – напор; Y – положение сервомотора направляющего аппарата.
В формирователь включены элементы компенсации влияния гидроудара и канала прямого управления. Компенсация влияния гидроудара, возникающего в процессе движения сервомотора, обеспечивает качественный динамический процесс регулирования мощности, а применение прямого канала управления с зависимостью Y = (P,H) быструю реакцию системы на управляющее воздействие.
Сигнал приращения dP поступает в сумматор приращений, где суммируется с сигналом от формирователя закона стабилизации частоты вращения.
В режиме генерирования мощности ограничение открытия устанавливается в зависимости от напора и ограничивает мощность агрегата в соответствии с эксплуатационной характеристикой.
1.3 Постановка задач исследования и путей решения
Эффективность управления гидроагрегатами ГЭС при пуске можно улучшить с помощью методов адаптивного управления, использующих обучаемые нелинейные модели процессов, происходящих в ОУ. На их базе уже созданы эффективные системы адаптивного управления объектами авиационно-космической техники, технологическими процессами химических производств и другими сложными системами. Также, эффективность работы системы управления можно увеличить за счет корректировки комбинаторной зависимости, оценки уровня вибрации и деформации вала, что приводит к увеличению межремонтного срока и уменьшает затраты на эксплуатацию. Также появляется возможность проводить вибродиагностику на агрегатах, на которых не установлены системы вибродиагностики, что, по сути, является введением в систему «виртуального» датчика.
Теоретической и методологической основой предлагаемой системы адаптивного управления является способ управления сложными нелинейными объектами с ограниченными по абсолютной величине возмущающими воздействиями в условиях, когда математическое описание допустимых траекторий перехода переменных состояния в требуемое конечное состояние задано неравенствами.
Суть метода, показанная на рисунке 8, заключается в том, что в цепь обратной связи системы управления включают обучаемую математическую модель процессов формирования момента движущих сил турбины, активной мощности и опорных траекторий перехода переменных состояния гидроагрегата в требуемое состояние. Математическая модель содержит нелинейные уравнения, описывающие эти процессы, и учитывает неконтролируемые возмущающие воздействия на объект управления.
Рисунок 8. Схема системы обучения модели объекта
Для достижения поставленной цели автоматизации технологического процесса необходимо решить следующие задачи [5]:
1. Составить математическую модель процесса формирования активной мощности гидроагрегата в пространстве состояний;
2. Выполнить анализ наблюдаемости и управляемости модели объекта управления;
3. Составить алгоритм обучения модели (уточнения оценок параметров и переменных состояния) в контуре управления;
4. Анализ качества полученной модели;
5. Составить алгоритм формирования управляющих воздействий;
6. Выполнить анализ качества разработанной САУ.
Пункт 2 в нашем случае не требуется, т.к. анализируется и модернизируется уже существующая система управления, имеющая вышеуказанные свойства. Пункты 5 и 6 выходят за рамки данной работы и здесь рассматриваться не будут.
Задачи управления, анализа и моделирования различных процессов и систем решают с применением их математических моделей. В нашем случае составить математическую модель, учитывающую реальные процессы, протекающие в гидроагрегате, не представляется возможным в виду ее чрезмерной сложности. Поэтому в данной работе используются модели типа «черный ящик», имеющих вход и выход.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.