Силовой анализ машин и механизмов.
Все машины и механизмы работают в силовых полях.
Целью силового анализа машин и механизмов является определение или нахождения реакции в кинематических парах и мощности приводного механизма, который оживляет машину.
Классификация сил, действующих в машинах и механизмах.
Внешние силы – это все силы, которые действуют на механизм из окружающей среды. Их разделяют на:
Fпс (Mпс) – силы произвольных сопряжений
Fпс обычно приложены к выходному звену механизма, они являются полезными, так как для их преодоления машины и созданы.
Aпс < 0 (за цикл)
Fпс должны быть заданы и Fпс = f(x, x’, x’’,t). Задаются аналитически или графически.
Fд (Mд ) – силы движения.
Fд приложены к начальным звеньям механизмов, они его оживляют.
Ад > 0
Они также могут быть заданы или находиться.
Fm – силы веса.
Fm возникают из – за наличия массы у звеньев, отличительной особенностью этих сил является то, что они всегда направлены в одну сторону.
Am = 0
Fуп (Mуп) – возникает из – за деформации звеньев.
Aуп = 0
Fc – силы сопряжения, возникающие в кинематических парах из – за возникновения трения.
В основном являются вредными.
Ac < 0
Fин – силы инерции.
Fин = - mкак
 Для упрощения все силы приводят
F = ms*as M
= Js*Es
Для упрощения все силы приводят
F = ms*as M
= Js*Es
к одной точке S.
S
Условие статической определенности кинематических цепей.
Каждая кинематическая пара в механизме накладывает на звенья связи. Число наложенных кинематической парой связей равно числу возникших в ней реакций.
 R Одна
реакция – одна связь.
R Одна
реакция – одна связь.
Пусть кинематическая цепь существует в П - подвижном пространстве и имеет n - подвижных звеньев и pi - кинематических пар, тогда для всех подвижных звеньев могут быть составлены П*n уравнений кинетостатики.
Уравнения кинетостатики учитывают все внешние силы и силы инерции.
Число связей, которые накладывают кинематические пары на звенья, могут быть определены как:
п - 1
å ( П – i )* pi
i = 1
Эта формула подсчитывает число реакций, возникающих в кинематической цепи.
Для того чтобы кинематическая цепь была статически определимой необходимо чтобы число уравнений статики было равно числу реакций.
п - 1
П*n = å ( П – i )* pi
i = 1
или
п - 1
П*n –å( П – i )* pi = 0
i = 1
Следовательно, статически определимыми являются структурные группы Ассура, поэтому силовой анализ механизмов проводится только по структурным группам.
Реакции в кинематических парах плоских механизмов.
Любая реакция является силой, а сила является векторной величиной. Любой вектор направлением, величиной и углом направления.
 F В
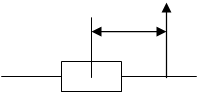
плоских механизмах наиболее часто применяют следующие
кинематические пары:
F В
плоских механизмах наиболее часто применяют следующие
кинематические пары:
a M

Во вращающихся парах точки приложения находятся в центре вращения пары.
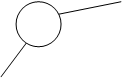 Известна
точка приложения
Известна
точка приложения
Неизвестно: a , F
 х
х
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.