F1 F12
M1 F10 F10
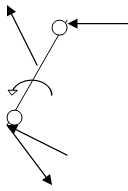
31. Обозначим на звене реакцию F10;
32. Составим векторное уравнение звена 1:
F 12 + F1 + F10 = 0
33. Рисуем план сил 1-го звена:
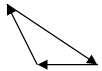 F1 F10
F1 F10
F12
34. Наносим найденную реакцию на звено 1;
35. Находим истинное значение F10 = m * (0тр F10).
Теорема Жуковского.
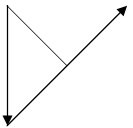
Если какое либо действие на механическую силу перенести // самой себе в одноименную точку повернутого на 90˚ плана скоростей, то момент этой силы относительно полюса плана скоростей будет прямо пропорционален мощности этой силы.
 Fk B Pv
Fk
Fk B Pv
Fk
r
![]() α Vk
α Vk
α D
K
K
A
Найдем MPv = Fk * r = Fk * Pv * k * cosα = Fk * Vk * (1 / μv) * cosα = Pk * 1 / μv

 B
B
Mk = F’k * lk
 |
F’k F’k Fk = Mk / lk
 Mk
Mk
A
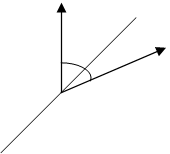
Для того чтобы восп. теорему Жуковского все моменты действующие на звенья заменяются парой сил.
Теорема Жуковского очень часто используется при силовом анализе машин и механизмов при определении Mд, который должен оживить наш механизм. При этом реакции в кинематических парах не определяются.
для кривошипно-шатунного механизма.
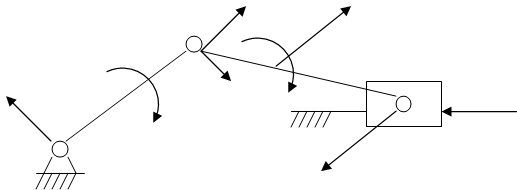 F2
F2
B F2`` M2
С
F1`` F1` S2 Fпс
M1 D
A
F2
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.