Рис.8. Желаемая ПХ до коррекции (![]() ) и желаемая дискретная ПХ отвечающая
требованиям осуществимости и грубости
) и желаемая дискретная ПХ отвечающая
требованиям осуществимости и грубости
По пункту 4.
ДПФ замкнутой системы определяется по формуле
 ,
(4)
,
(4)
где  – эквивалентная ДПФ непрерывной
части.
– эквивалентная ДПФ непрерывной
части.
Приравнивая ![]() к
к ![]() и
выражая
и
выражая ![]() , получаем формулу для определения
ДПФ цифрового регулятора:
, получаем формулу для определения
ДПФ цифрового регулятора:
![]() .
.
При
вычислении ![]() следует сокращать кратные нули и
полюса. Если вычисления производятся в Matlab, то ПФ, фигурирующие в формуле, должны быть заданы в zpk – форме.
следует сокращать кратные нули и
полюса. Если вычисления производятся в Matlab, то ПФ, фигурирующие в формуле, должны быть заданы в zpk – форме.
На рис.9 и рис.10 иллюстрируется процесс моделирования. Для примера выбрана схема моделирования с исходным ОУ и с ЦР, заданным в последовательно-декомпозированной форме. Другие схемы моделирования строятся аналогичным образом. Видно, что ЦР задается в дискретном виде, а ОУ и ЗООС в непрерывном. Период дискретизации выставляется в блоке задания ДПФ ЦР.
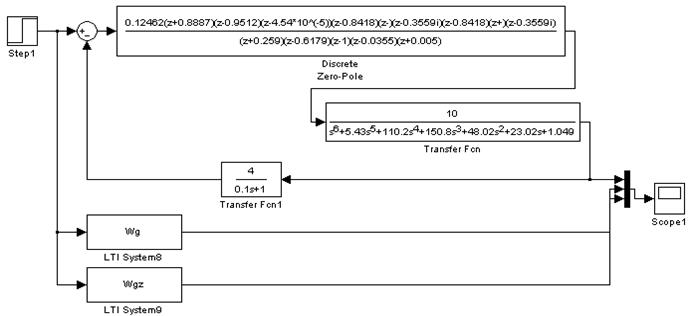
Рис.9. Схема моделирования с исходным ОУ и с ЦР, заданным в последовательно-декомпозированной форме
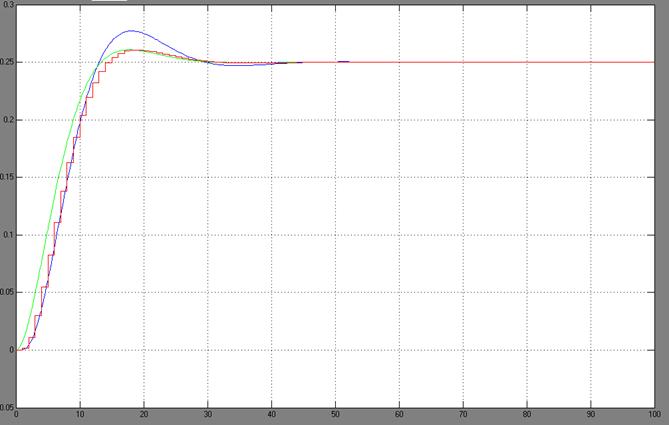
Рис.10. Желаемая ПХ до коррекции (![]() )
(зеленая), желаемая скорректированная ДПХ (красная) и ПХ замкнутой системы с
цифровым регулятором и исходным ОУ (синяя)
)
(зеленая), желаемая скорректированная ДПХ (красная) и ПХ замкнутой системы с
цифровым регулятором и исходным ОУ (синяя)
Из рис.10 видно, что динамика ОУ, неучтенная при синтезе ЦР, несущественно влияет на переходный процесс спроектированной замкнутой дискретной системы.
Литература
1. Лекции по курсу «Синтез законов управления в технических системах».
2. Медведев В.С., Потемкин В.Г. Control System Toolbox. Matlab 5 для студентов/ Под общ. ред. В.Г.Потемкина. – М.: ДИАЛОГ – МИФИ, 1999. – 287 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.