Таким образом, напряжение, приложенное к выводам рамки, уравновешивается падением напряжения на ее активном сопротивлении г и двумя ЭДС: трансформаторной dW/dtи ЭДС вращения Ч'у.со. Момент, развиваемый рамкой, определяется не только модулем тока и потокосцепления, но и взаимной ориентацией их векторов, расположенных в плоскости чертежа (рис. 1.1). Поэтому во втором уравнении (1.1) записано векторное произведение, где под i подразумевается вектор, модуль которого равен току, а направление определяется по правилу буравчика.
Уравнение 1.1 определяет основные свойства и ограничения, заложенные в ЭМП его принципом действия. Из (1.1) следует, что для создания среднего момента угол между векторами тока и потокосцепления должен меняться в ограниченных пределах, а для создания постоянного момента он должен 1 быть постоянным, т. е. положение этих векторов должно изменяться в пространстве с одинаковой скоростью
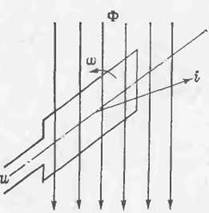
Рис. 1.1. Элементарный электромеханический преобразователь
Таким образом, для управления параметрами механической энергии на валу ЭМП можно организовать четыре воздействия: на модули тока и потокосцепления, на взаимную ориентацию этих величин и на общую скорость вращения их векторов.
Исследование процессов в ЭМП энергии обычно выполняют не непосредственно на конкретной .конструкции, а на эквивалентных моделях. Благодаря тому что в основе работы всех типов ЭМП автоматизированных электроприводов лежат одни и те же законы, появляется возможность создать универсальные общие модели для различных типов преобразователей. В этом смысле вращающиеся преобразователи можно разделить на две большие группы:
1) преобразователи, у которых токи (или
магнитные потоки) взаимно перемещающихся частей создаются с помощью источников
энергии переменного тока;
2) преобразователи, у которых одна часть
(статор или ротор)
возбуждается от источника энергии переменного тока, а другая —
от источника постоянного тока.
Основные законы преобразования энергии, лежащие в основе ЭМП, исключают построение ЭМП с непрерывным движением при возбуждении обеих частей постоянным током.
Рассмотрим последовательно эквивалентные модели ЭМП различных групп.
1.2. МОДЕЛИ
ЭЛЕКТРОМЕХАНИЧЕСКИХПРЕОБРАЗОВАТЕЛЕЙ
СВОЗБУЖДЕНИЕМОБЕИХЧАСТЕЙПЕРЕМЕННЫМТОКОМ
Одной из наиболее распространенных технических реализаций ЭМП первой группы являются асинхронные машины. Ограничив рассмотрение только трехфазными машинами, используем следующие общепринятые при анализе допущения [1, 5, 7]:
1)  параметры обмоток фаз статора и ротора соответственно
одинаковы, а
параметры обмоток фаз статора и ротора соответственно
одинаковы, а
система напряжений фаз симметрична;
2) магнитопроводы ненасыщены;
|
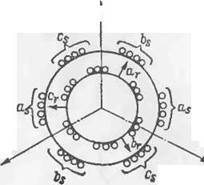
Рис. 1.2. Первичная модель асинхронной машины |
3) воздушный зазор между взаимно перемещающимися частями
ЭМП равно
мерный;
4) МДС в воздушном зазоре синусоидальна;
5) влияние потерь в стали и эффекта вытеснения тока и потока иа характеристики ЭМП не учитывавается;
6) обе части ЭМП имеют однотипные распределенные обмотки.
При других исполнениях одной из частей ЭМП (беличья клетка, полый или массивный ротор и т. д.) ее параметры можно привести к эквивалентной распределенной обмотке [1]. На рис. 1.2 даиа первичная модель асинхронной трехфазной машины (11, 28], изображаемая обычно в плоскости, перпендикулярной оси вала. Здесь условно изображены сечения обмоток фаз статора (присвоен индекс s) и ротора (присвоен индекс г) и оси этих обмоток, перпендикулярные их плоскостям. При подключении обмоток к источникам трехфазного переменного напряжения токи в обмотках будут определяться уравнениями равновесия напряжений [16, 28]
Здесь — полное потокосцепление обмоток соответствующих фаз; г — акивные сопротивления обмоток (не различаются по фазам вследствие симметрии), а токи / и напряжения и — функции времени с соответствующими фазоопределяются изменением потоковыми сдвигами [16]. Кроме того, ЭДС цеплений обмоток во времени как под действием изменения соответствующих токов во времени, так и под действием взаимного перемещения обмоток статора и ротора.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.