2.2 Алгоритмы первичной обработки измерительной информации
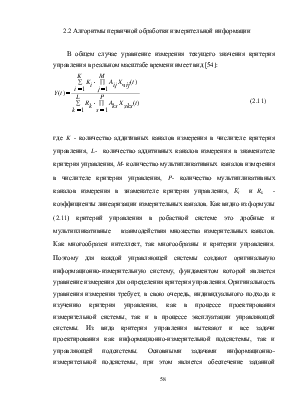
В общем случае уравнение измерения текущего значения критерия управления в реальном масштабе времени имеет вид [54]:
 (2.11)
(2.11)
где K - количество аддитивных каналов измерения в числителе критерия управления, L- количество аддитивных каналов измерения в знаменателе критерия управления, M- количество мультипликативных каналов измерения в числителе критерия управления, P- количество мультипликативных каналов измерения в знаменателе критерия управления, Кi и Rk - коэффициенты линеаризации измерительных каналов. Как видно из формулы (2.11) критерий управления в робастной системе это дробные и мультипликативные взаимодействия множества измерительных каналов. Как многообразен интеллект, так многообразны и критерии управления. Поэтому для каждой управляющей системы создают оригинальную информационно-измерительную систему, фундаментом которой является уравнение измерения для определения критерия управления. Оригинальность уравнения измерения требует, в свою очередь, индивидуального подхода к изучению критерия управления, как в процессе проектирования измерительной системы, так и в процессе эксплуатации управляющей системы. Из вида критерия управления вытекают и все задачи проектирования как информационно-измерительной подсистемы, так и управляющей подсистемы. Основными задачами информационно-измерительной подсистемы, при этом является обеспечение заданной точности определения (косвенного измерения) критерия управления. Что касается управляющей подсистемы, то критерий управления обуславливает сложность всех алгоритмов как управления, так и текущей идентификации положения рабочей точки, а поэтому критерий должен выбираться так, что бы в результате линеаризации были минимизированы потери информации обо все параметрах входящих в критерий управления.
Математическое обеспечение информационных подсистем в любой технической системе определяется типовой структурой программно-аппаратного измерительного канала, представленной рисунком 2.15, на котором показаны допущения к математическим моделям элементов программно-аппаратного измерительного канала, сформулированные в виде математических моделей (2.12 -:- 2.22). Согласно схеме искажённый помехой измеряемый сигнал, X(t) измеряется первичным преобразователем с динамической характеристикой, ha(t), нормируется аналоговым устройством с динамической характеристикой, hn(t) и подаётся на вход модуля УСО для ввода аналоговой информации (МВА) в ЭВМ.
Рис.2.15. Структурная модель измерительного канала технической системы.
В модуле УСО для ввода аналоговой информации (МВА), сигнал обрабатывается сначала статическими операторами, k(iTS) , а затем динамическими операторами, hf(iTS). Программно обработанный сигнал подается на регистрацию и хранение через модуль вывода аналоговой информации с динамической характеристикой, hr(t).
X(t) Y(t)
![]() Объект
Объект
![]()
![]()
![]()
![]()
![]() h(t)
h(t)
hp(t) hp(t)
![]()
![]()
![]()
![]()
hn(t) hn(t)
![]()
![]()
![]()
![]()
![]()
![]() МВА
МВА
МВА
МВА
![]()
![]()
![]()
 h f(iTS) h f(iTS)
h f(iTS) h f(iTS)
![]()
![]()
![]()
![]()
 k(iTS)
k(iTS)
k(iTS)
k(iTS)
![]()
![]()
 |
 |
![]() k1(iTS) k1(iTS)
k1(iTS) k1(iTS)
![]()
![]()
h (iTS)
![]()
|
|
Рис.2.16 Схема обработки информации в технической системе
Таким образом, отображается дискретная последовательность, Z(iTS), измеренных значений сигнала, X(t), то есть регистрируется на вторичном приборе и хранится в памяти модуля вывода аналоговой информации, столько, сколько это необходимо для процессов идентификации и адаптивного управления.
Если типовую структурную схему цифровой обработки измерительной информации (см. рис. 2.15) применить к одномерному объекту управления, то алгоритмическое обеспечение информационно-измерительной подсистемы адаптивного управления таким объектом выстроится в структурную схему обработки информации виртуального прибора для измерения критерия управления этим одномерным объектом управления, Y(t) (см. рис. 2.16). Анализ схемы на рисунке 2.16 показывает, что в интеллектуальных измерительных системах предъявляются разные требования к обработке входной и выходной информации с объекта управления (главным образом для входных переменных). Наличие в канале обработки входного управляющего воздействия динамической характеристики объекта управления, h (iTS) , является необходимым для приведения входных и выходных параметров к одному моменту времени измерения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.