ЛЕКЦИЯ 4. КИНЕМАТИЧЕСКИЙ РАСЧЕТ ПРИВОДОВ ГЛАВНОГО ДВИЖЕНИЯ СО СТУПЕНЧАТЫМ РЕГУЛИРОВАНИЕМ СКОРОСТИ
Кинематический расчет является одним из наиболее ответственных этапов проекта, поскольку кинематика привода предопределяет производительность, конструкцию, габариты, динамику, металлоемкость и другие кинематические и конструктивные параметры привода. Расчет производится графоаналитическим методом, что позволяет наглядно выбрать наиболее оптимальный вариант проектируемого привода.
4.1. Определение величины знаменателя геометрической прогрессии ряда частот вращения шпинделя
При проектировании привода главного движения коробок скоростей обычно задаются предельные частоты вращения шпинделя, а также число ступеней скорости. Прежде всего необходимо определить значение диапазона регулирования частот вращения Rn:
![]()
где n mах и n min — наибольшая и наименьшая частоты вращения шпинделя, рассчитанные по режимам резания.
Диапазон регулирования является показателем кинематических возможностей привода. Для универсальных станков характерны следующие величины диапазона регулирования:
Токарные станки.............................. 50—200
Фрезерные....................................... 20—100
Карусельные...................................... 25—40
Радиально-сверлильные .................. 20—100
Вертикально-сверлильные................. 15—30
Токарно-револьверные...................... 20—60
Строгальные, долбежные..................... 5—40
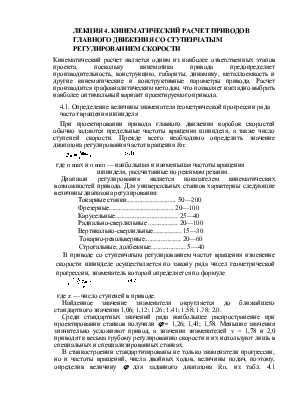
В приводе со ступенчатым регулированием частот вращения изменение скорости шпинделе осуществляется по закону ряда чисел геометрической прогрессии, знаменатель которой определяется по формуле

где z — число ступеней в приводе.
Найденное значение знаменателя округляется до ближайшего стандартного значения 1,06; 1,12; 1,26; 1,41; 1,58; 1,78; 2,0.
Среди стандартных значений ряда наибольшее распространение при проектировании станков получили j = 1,26; 1,41; 1,58. Меньшие значения значительно усложняют привод, а значения знаменателей у = 1,78 и 2,0 приводят к весьма грубому регулированию скорости и их используют лишь в специальных и специализированных станках.
В станкостроении стандартизированы не только знаменатели прогрессии, но и частоты вращений, числа двойных ходов, величины подач, поэтому, определив величину j для заданного диапазона Rn, из табл. 4.1 выписывается Z стандартных значений частот вращения шпинделя.
![]()
Ряды чисел более 1000 и менее 1 получаются умножением или делением табличных данных на 1000.
Допускается составление производных рядов из нормальных путем пропуска части чисел. Так, например, при j= 1,41, кроме ряда 125, 180, 250, 355 и т.д., можно использовать ряд 132, 190, 265, 375, 530 и т.д. или ряд 140, 200, 280, 400 и т.д., или любой другой полученный аналогичным образом ряд.
4.2. Выбор структуры привода
Структурная формула
Структура привода, состоящая из одной кинематической цепи, в которой число скоростей определяется как произведение чисел скоростей последовательно соединенных групп передач, называется нормальной множительной структурой, а ее структурная формула
![]()
где Z — число скоростей привода;
Ра, рь, Ре ......... Pi — числа скоростей первой, второй, третьей,
i-й групп передач (число сомножителей представляет собой количество групп передач в механизме).
При ступенчатом регулировании каждая группа передач образует ряд передаточных отношений со знаменателем геометрической прогрессии —jх (х — целое число).
Весь последовательный геометрический ряд частот вращения на шпинделе в диапазоне от nmin до nmax будет получаться путем различных комбинаций передач в группах в зависимости от принятого порядка переключений.
Если прежде всего используются передачи группы «а», затем — группы «b», далее — группы «с», то соответственно принятому порядку переключений группа «а» будет называться основной, группа b» — первой переборной, группа «с» — второй переборной и т.д.
Основная группа образует начальный ряд частот вращения со знаменателем jx. Для основной группы передач Рa показатель степени х1 = 1. Первая переборная группа, вторая переборная и т.д. служат для расширения диапазона регулирования, создаваемого основной группой, до требуемого диапазона на шпинделе от nmin до nmax. Для первой переборной группы Pa показатель степени х2 равен числу передач в основной группе, т.е. х2 = Рa.
Для второй переборной группы Рc показатель степени x3 равен произведению чисел передач в основной и первой переборной группах. Следовательно, если привод состоит из i групп передач, то показатель степени «х» в последней переборной (Р1) группе будет равен произведению чисел передач всех групп.
В развернутой структурной формуле кроме чисел передач в группах в скобках указываются показатели степени «х» каждой группы.
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.