Министерство образования и науки Российской Федерации
Саратовский государственный технический университет
Балаковский институт техники, технологии и управления
КОНТРОЛЬНАЯ РАБОТА №2
Методическое указание к выполнению контрольной работы
по дисциплине “Идентификация и диагностика систем управления”
для студентов специальности 220201.65
заочной формы обучения
Одобрено
редакционно-издательским советом
Балаковского института техники,
технологии и управления
Методическое указание рекомендовано на заседании кафедры
“Управление и информатика в технических системах”
“ 30 ” августа 2011 г.
Протокол № 1
Зав. кафедрой _______________ Т.Н. Скоробогатова
Балаково 2011
ОСНОВНЫЕ ПОНЯТИЯ
В данной работе строятся математические моделиобъектов первого, второго порядка и реального интегрирующего звена.
1. Дифференциальное уравнение объекта управления апериодического звена первого порядка:
 (1)
(1)
где x– входная величина; y- выходная величина.
Структурная схема объекта управления апериодического звена первого порядка представлена на рисунке 1.
 |
|||||
Рис. 1 - Структурная схема объекта управления апериодического
звена первого порядка
Разностное уравнение при
периоде дискретизации ![]() объекта первого порядка:
объекта первого порядка:
![]() (2)
(2)
где a, b – коэффициенты, вычисляемые по формулам:
![]() (3)
(3)
где k- коэффициент усиления звена; Т - постоянная времени звена.
2. Дифференциальное уравнение объекта управления апериодического звена второго порядка:
 (4)
(4)
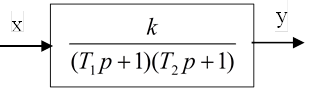
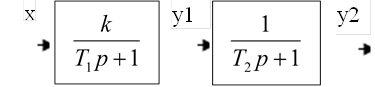
Структурная схема объекта управления апериодического звена второго порядка может быть представлена в виде последовательного соединения двух элементов первого порядка рисунок 2.
 |
|||
 |
|||
Рис. 2 - Структурная схема объекта управления апериодического
звена второго порядка
Разностные уравнения, описывающие два последовательно соединенных звена первого порядка, имеют вид:
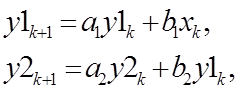 (5)
(5)
Коэффициенты уравнений находятся по формулам:
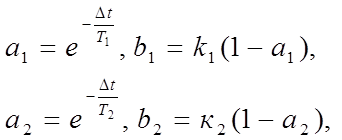 (6)
(6)
где k1 ,k2 - коэффициенты усиления звеньев; Т1,Т2 - постоянные времени звеньев.
3. Дифференциальное уравнение объекта управления реального интегрирующего звена имеет вид:
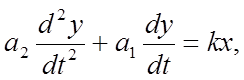 (7)
(7)
Структурная схема объекта управления реального интегрирующего звена может быть представлена в виде последовательного соединения двух звеньев:
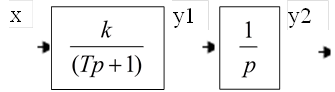 |
Рис. 3 - Структурная схема реального интегрирующего объекта управления
Разностные уравнения, описывающие два последовательно соединенных звена, имеют вид:
 (8)
(8)
где a, b – коэффициенты, вычисляемые по формулам:
![]() (9)
(9)
где k- коэффициент усиления апериодического звена; Т - постоянная времени апериодического звена.
Задача нелинейного программирования - подобрать такой вектор параметров модели B, чтобы при выбранном уравнении модели объекта критерий оптимизации I, равный сумме квадратов отклонений между расчетными и экспериментальными значениями, был минимальным:
 (10)
(10)
1. Создать таблицу и ввести исходные
данные – количество точек N, значения
![]() для трех экспериментов.
для трех экспериментов.
2. Построить график зависимости ![]() для первого эксперимента.
для первого эксперимента.
3. По виду графика выбрать вид модели.
4. Выделить ячейки для параметров выбранной модели и ввести начальные значения k - коэффициента усиления и T- постоянной времени звена, определенные по графику.
5. Рассчитать коэффициенты a,b разностного уравнения по выражениям (3,6,9).
6. Рассчитать выходную переменную ![]() по разностным уравнениям (2,5,8).
по разностным уравнениям (2,5,8).
7. Рассчитать 95% ошибку аппроксимации по выражению:
 ,
(11)
,
(11)
где N - количество экспериментов , m – число входных величин.
8. На диаграмме выходной переменной ![]() построить график
построить график ![]() ,
рассчитанный при начальных значениях коэффициентов модели.
,
рассчитанный при начальных значениях коэффициентов модели.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.