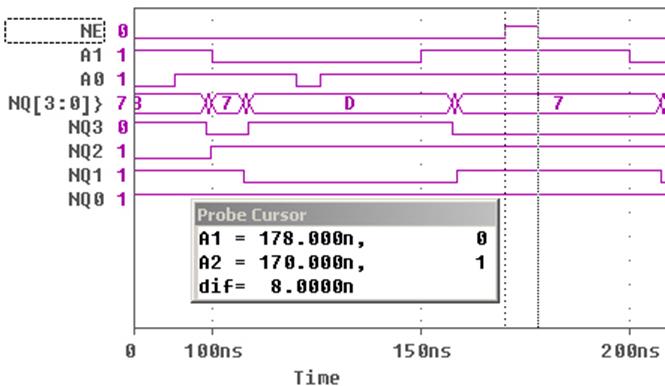
Рис. 13. Пример № 2 нарушения временных соотношений
На рис. 13
показан случай, при котором за то время удержания сигнала выключения
дешифратора он не выключается, что собственно и является нарушением логики
работы схемы. Следовательно, время удержания сигнала ![]() не
должно быть менее чем данное время
не
должно быть менее чем данное время ![]() = 8.5 ns.
Следовательно, частота повторения сигнала выключения дешифратора должна быть:
= 8.5 ns.
Следовательно, частота повторения сигнала выключения дешифратора должна быть:  Гц = 117 МГц.
Гц = 117 МГц.
Следующие два примера относятся к случаям работы с входами Ax
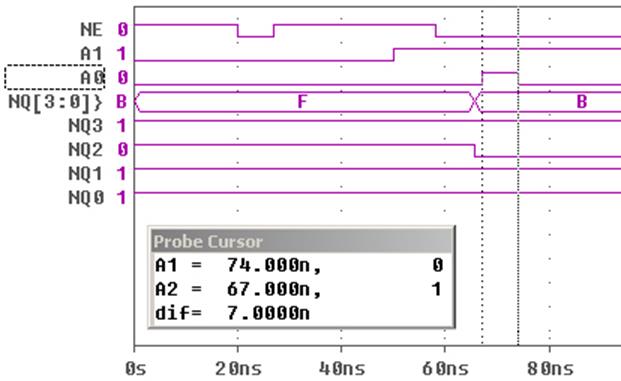
Рис. 14. Пример № 3 нарушения временных соотношений
Время удержание сигнала
адреса настолько мало, что схема не успевает отреагировать должным образом, время
удержания сигнала адреса, при переходе из LàH,
должно быть не менее ![]() = 7.5 ns.
Таким образом, частота переключения сигнала должна быть не более
= 7.5 ns.
Таким образом, частота переключения сигнала должна быть не более  Гц = 133 MГц.
Гц = 133 MГц.
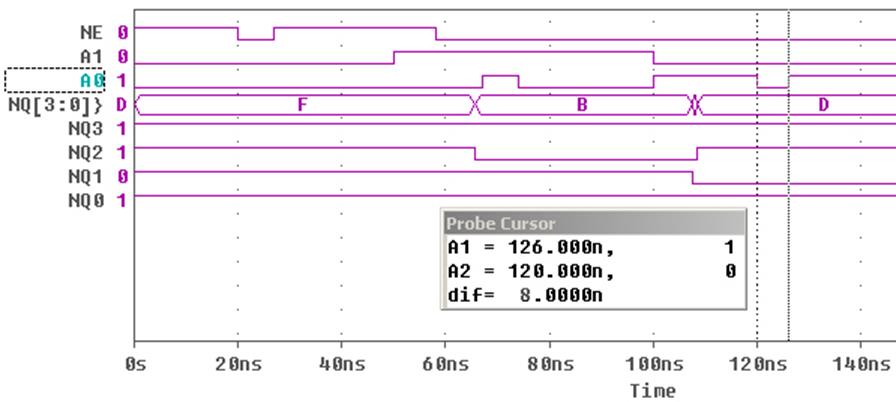
Рис. 15. Пример №4, нарушения временных соотношений
Время удержание
сигнала адреса настолько мало, что схема не успевает отреагировать должным
образом, время удержания сигнала, при переходе с HàL,
адреса должно быть не менее ![]() = 8.5 ns.
Таким образом, частота переключения сигнала должна быть не более Гц = 117 МГц.
= 8.5 ns.
Таким образом, частота переключения сигнала должна быть не более Гц = 117 МГц.
2.8. Функциональное описание проектируемого узла с помощью примитивов LOGICEXP, PINDLY и CONSTRAINT и оформление его в виде макромодели
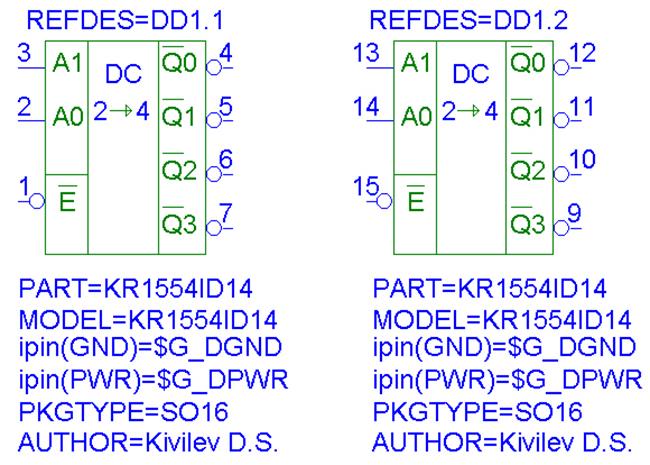
Рис. 16. УГО символа использующего для функционального описания макромодель
*************КР1554ИД14 Сдвоенный дешифратор 2->4*******************
**Директива начала макромодели
.SUBCKT KR1554ID14 EBAR_I A0_I A1_I Q0BAR_O Q1BAR_O Q2BAR_O Q3BAR_O
+ OPTIONAL: DPWR=$G_DPWR DGND=$G_DGND
+ PARAMS: MNTYMXDLY=0 IO_LEVEL=0
**Логический блок. Здесь зашита функциональность элемента
U1554ID14LOG LOGICEXP (3,7) DPWR DGND
+ EBAR_I A0_I A1_I
+ EBAR A0 A1 *входы в логический блок
+ Q0BAR Q1BAR Q2BAR Q3BAR *выходы из лог. блока
+ D0_GATE IO_STD
+ IO_LEVEL={IO_LEVEL}
+
+ LOGIC: *логическая секция
+ EBAR = { EBAR_I }
+ A0 = { A0_I }
+ A1 = { A1_I }
+ A0BAR = { ~A0 }
+ A1BAR = { ~A1 }
+ ENABLE = { ~EBAR }
+ Q0BAR = { ~(ENABLE & A1BAR & A0BAR ) }
+ Q1BAR = { ~(ENABLE & A1BAR & A0 ) }
+ Q2BAR = { ~(ENABLE & A1 & A0BAR ) }
+ Q3BAR = { ~(ENABLE & A1 & A0 ) }
** Блок задержек. Он отвечает за моделируемые временные задержки
U1554ID14DLY PINDLY (4,0,3) DPWR DGND
+ Q0BAR Q1BAR Q2BAR Q3BAR * для четырех линий вычисляется задержка
+ EBAR A0 A1 *а это те самые сигналы от которых зависят те самые задержки
+ Q0BAR_O Q1BAR_O Q2BAR_O Q3BAR_O * а вот это выходные линии из данного блока
+ IO_STD
+ MNTYMXDLY={MNTYMXDLY} IO_LEVEL={IO_LEVEL}
+
+ BOOLEAN: *переменные переключения сигнала
+ ABLE = { CHANGED(EBAR,0) }
+ ADDR = { CHANGED(A0,0) | CHANGED(A1,0) }
+
+ PINDLY: *ну вот и самое главное, где «генерируются» задержки
+ Q0BAR_O Q1BAR_O Q2BAR_O Q3BAR_O = {
+ CASE (
+ ADDR & TRN_LH, DELAY(-1NS,8.5NS, 10NS),
+ ADDR & TRN_HL, DELAY(-1NS,7.5NS, 8.5NS),
+ ABLE & TRN_LH, DELAY(-1NS,8.5NS,10NS),
+ ABLE & TRN_HL, DELAY(-1NS,7.5NS, 8.5NS),
+ DELAY(7.0NS,7.0NS,10.0NS)
+ )
+ }
.ENDS
Небольшая оговорка, при задании временных задержек в функции DELAY первый параметр = -1, т.е. на место средней задержки поставлена минимальная.
А вообще, по сравнению с VHDL такое описание очень гибко задает время распространения сигналов, т.е. можно задать максимальный путь и минимальный, тогда как в VHDL пришлось бы изворачиваться (см. гл. 3).
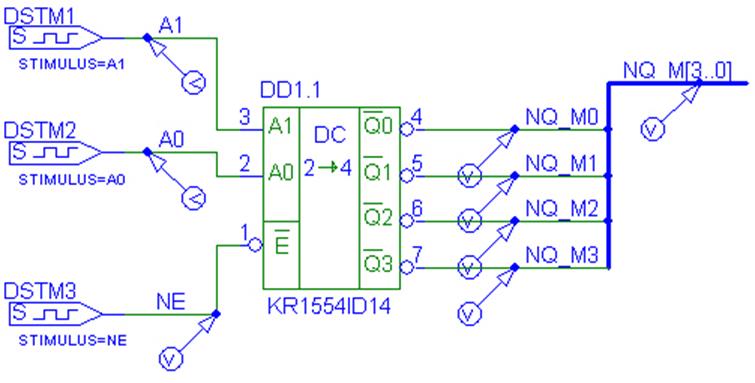
Рис. 17. Схема верификации элемента с подключенной макромоделью
В данной схеме (рис. 17) выходные сигналы помечены как NQ_Mx, т.е. обозначение отражает, то свойство схемы, что производится верификация элемента с макромоделью.
Далее приводится временная диаграмма работы данного элемента. Естественно, что тестовые сигналы идентичны сигналам тестирования элемента в п.2.6. Фактически приведенная диаграмма идентична временной диаграмме приведенной на рис.7. Исходя из выше сказанного, приводится один пример задержек.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.