+
+ PINDLY:
+ D0_O D7_O = {
+ CASE(
+ CLOCK & TRN_LH, DELAY(5NS,-1,15NS),
+ CLOCK & TRN_HL, DELAY(8NS,-1,18NS),
+ CHANGED(CLRBAR,0) & TRN_HL, DELAY(6NS,-1,22NS),
+ DELAY(9NS,-1,23NS) ;DEFAULT
+ )
+ }
+
+ TRISTATE:
+ ENABLE LO OE
+ ZD0_B ZD1_B ZD2_B ZD3_B ZD4_B ZD5_B ZD6_B ZD7_B = {
+ CASE(
+ ENABLE1 & TRN_ZH, DELAY(6NS,-1,16NS),
+ ENABLE2 & TRN_ZH, DELAY(7NS,-1,17NS),
+ ENABLE1 & TRN_ZL, DELAY(8NS,-1,22NS),
+ ENABLE2 & TRN_ZL, DELAY(8NS,-1,22NS),
+ DISABLE1 & TRN_HZ, DELAY(1NS,-1,8NS),
+ DISABLE2 & TRN_HZ, DELAY(1NS,-1,12NS),
+ DISABLE1 & TRN_LZ, DELAY(5NS,-1,15NS),
+ DISABLE2 & TRN_LZ, DELAY(8NS,-1,25NS),
+ CLOCK & TRN_LH, DELAY(4NS,-1,13NS),
+ CLOCK & TRN_HL, DELAY(7NS,-1,19NS),
+ CHANGED(CLRBAR,0) & TRN_HL, DELAY(6NS,-1,22NS),
+ DELAY(9NS,-1,26NS) ;DEFAULT
+ )
+ }
+
+ FREQ:
+ NODE = C
+ MAXFREQ = 30MEG
+
+ WIDTH:
+ NODE = C
+ MIN_HI = 16.5NS
+ MIN_LO = 16.5NS
+
+ SETUP_HOLD:
+ DATA(1) = CLRBAR
+ CLOCK LH = C
+ SETUPTIME_LO = 20NS
+ SETUPTIME_HI = 16NS
+
+ SETUP_HOLD:
+ DATA(2) = SEMO1 SEMO0
+ CLOCK LH = C
+ SETUPTIME = 20NS
+ WHEN = { CLRBAR!='0 }
+
+ SETUP_HOLD:
+ DATA(8) = ZD0 ZD1 ZD2 ZD3 ZD4 ZD5 ZD6 ZD7
+ CLOCK LH = C
+ SETUPTIME_HI = 16NS
+ SETUPTIME_LO = 6NS
+ WHEN = { CLRBAR!='0
+ & (SEMO1!='0 ^ CHANGED(SEMO1,0)) & (SEMO0!='0 ^ CHANGED(SEMO0,0)) }
+
+ SETUP_HOLD:
+ DATA(1) = SL
+ CLOCK LH = C
+ SETUPTIME_HI = 16NS
+ SETUPTIME_LO = 6NS
+ WHEN = { CLRBAR!='0
+ & (SEMO1!='0 ^ CHANGED(SEMO1,0)) & (SEMO0!='1 ^ CHANGED(SEMO0,0)) }
+
+ SETUP_HOLD:
+ DATA(1) = SR
+ CLOCK LH = C
+ SETUPTIME_HI = 16NS
+ SETUPTIME_LO = 6NS
+ WHEN = { CLRBAR!='0
+ & (SEMO1!='1 ^ CHANGED(SEMO1,0)) & (SEMO0!='0 ^ CHANGED(SEMO0,0)) }
*
.ENDS
*
*$
Моделирование регистра ИР29 в пакете OrCAD 9.1
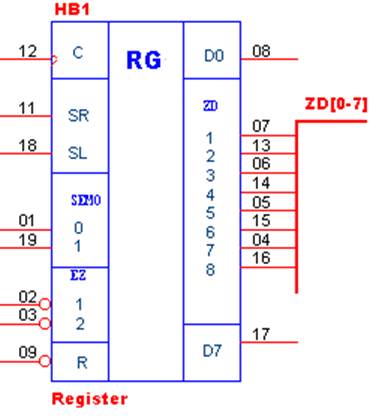 |
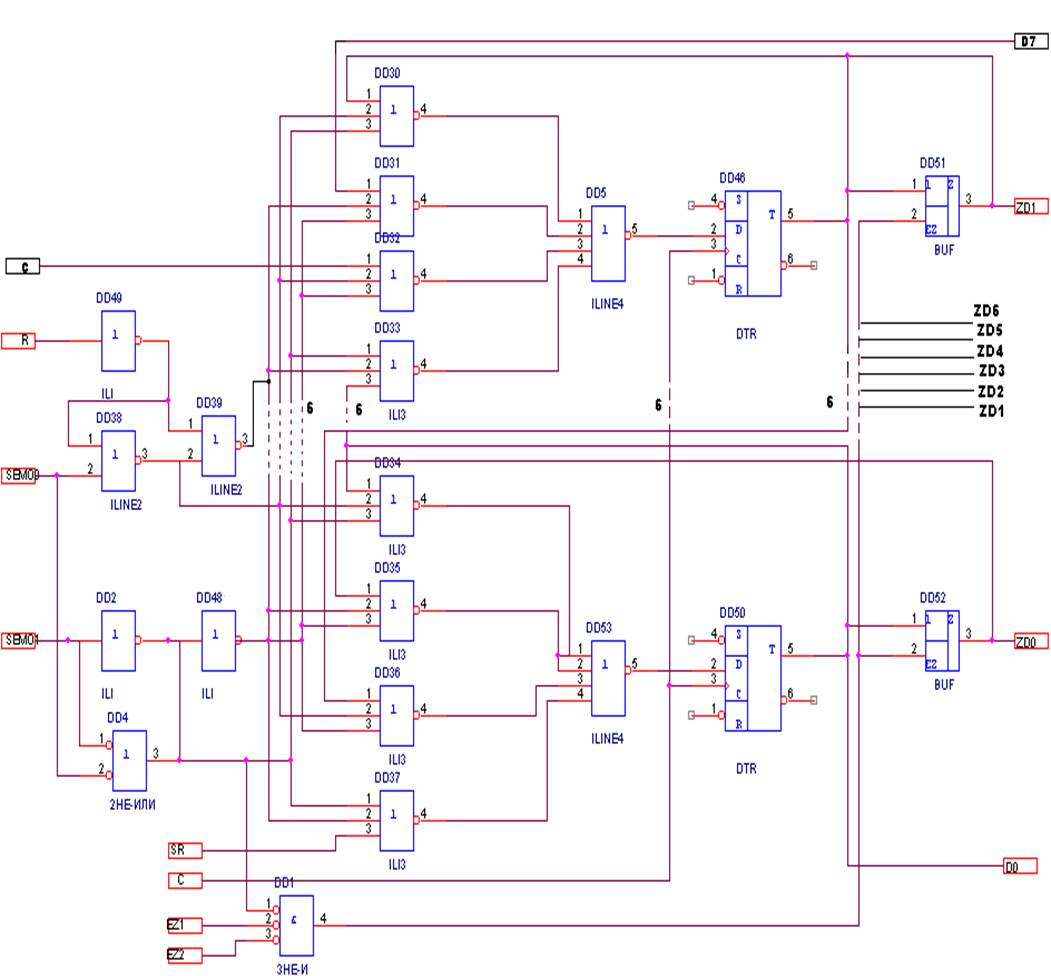
Рис 8. Внутреннее описание проектируемого узла.
11. Результаты моделирования узла в пакете OrCAD 9.1
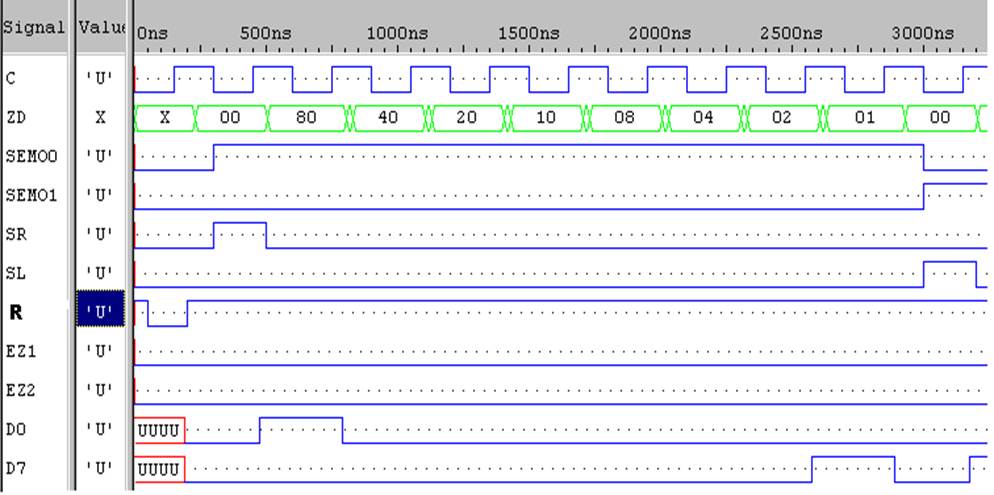
Рис 9 Установка “Логический 0” и сдвиг вправо.
На рис. 9, с помощью временных диаграмм, наглядно представлены следующие режимы работы регистра:
а ) Режим установки логического нуля, который происходит в том случае, если один из входов выбора режима работы ( SEMO0 и SEMO1)
имеют высокий уровень сигнала.
б)Сдвиг вправо. Реализуется после активизации SR (входа разрешения “сдвига вправо”) и высокого уровня SEMO0.
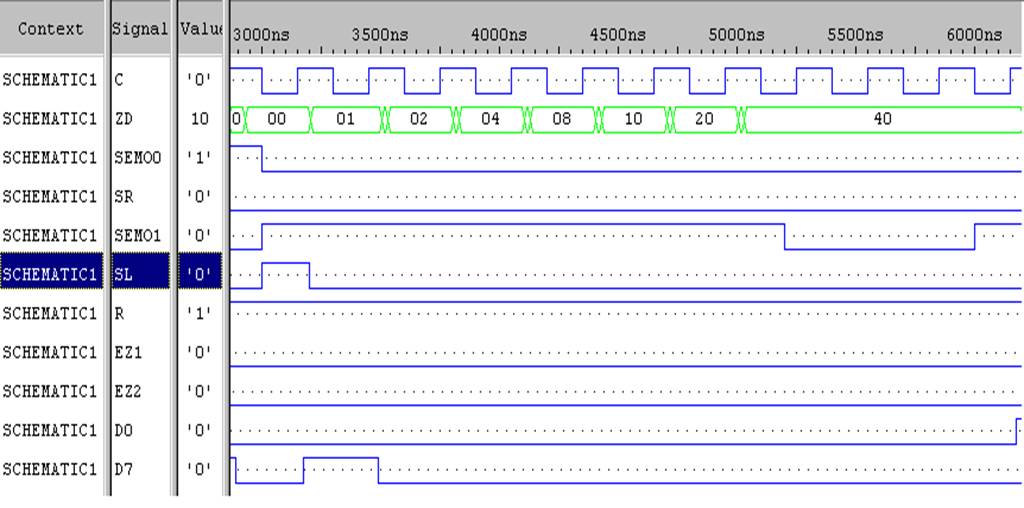
Рис. 10.Сдвиг влево.
На рис. 10, с помощью временных диаграмм, наглядно представлены следующие режимы работы регистра:
а ) Сдвиг влево. Реализуется после активизации SL(входа разрешения “сдвига вправо”), установки SEMO0 в нуль, и высокого уровня SEMO1.
б) Режим удержания ( 40 )
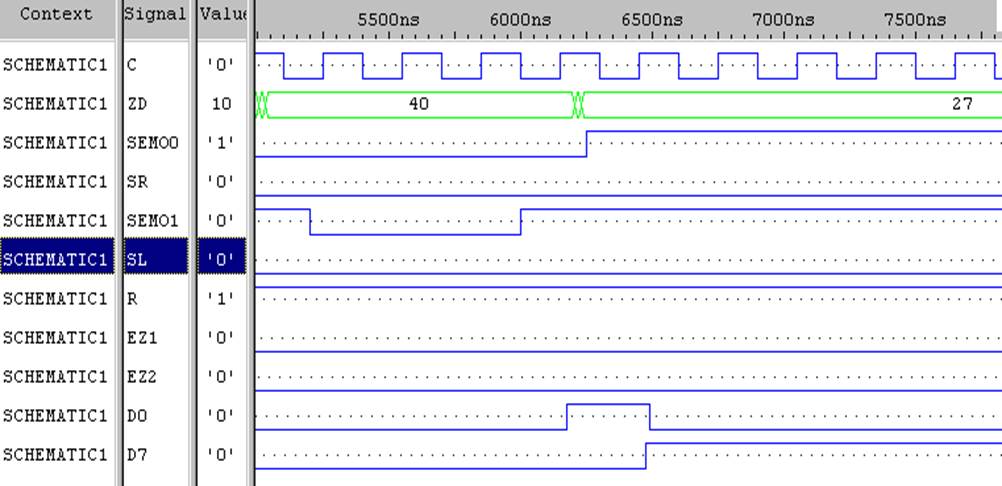
Рис 11.Режим загрузки.
На рис. 11, с помощью временных диаграмм , наглядно представлен режим загрузки (27).
12. Поведенческая VHDL- модель узла.
library IEEE;
use IEEE.STD_LOGIC_1164.all;
use IEEE.NUMERIC_STD.all;
entity \register\ is
port(C,SR,SL,SEMO0,SEMO1,EZ1,EZ2,R : in std_logic;
D0,D7 : out std_logic;
ZD0,ZD1,ZD2,ZD3,ZD4,ZD5,ZD6,ZD7 :inout std_logic);
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.