а ) Сдвиг влево. Реализуется после активизации SL(входа разрешения “сдвига вправо”), установки SEMO0 в нуль, и высокого уровня SEMO1.
б) Режим установки и удержания логического нуля,
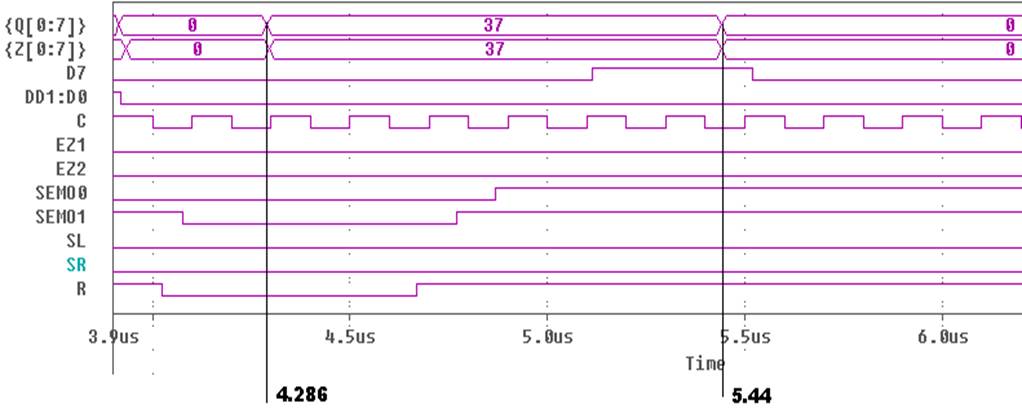
Рис 6.Загрузка.
На рис. 5, с помощью временных диаграмм наглядно представлен режим загрузки и последующая установка в нуль.
8. Оценка предельных скоростных возможностей исследуемого узла.
Для оценки скоростных возможностей узла я постепенно увеличивал частоту тактирующего сигнала C в результате чего на частоте 14 MHz появились ошибки.
9. Функциональное описание проектируемого узла.
Задержки «заложенные» в макромодель идентичны задержкам, измеренным на принципиальной схеме узла.
.SUBCKT Register3 CLK_I CLRBAR_I SEMO1_I SEMO0_I G1BAR_I G2BAR_I SL_I SR_I
+ ZD0_B ZD1_B ZD2_B ZD3_B ZD4_B ZD5_B ZD6_B ZD7_B D0_O D7_O
+ OPTIONAL: PWR=$G_DPWR GND=$G_DGND
+ PARAMS: MNTYMXDLY=0 IO_LEVEL=0
*
URegister3LOG LOGICEXP(32,25) PWR GND
+ CLK_I CLRBAR_I SEMO1_I SEMO0_I G1BAR_I G2BAR_I SL_I SR_I
+ ZD0_B ZD1_B ZD2_B ZD3_B ZD4_B ZD5_B ZD6_B ZD7_B ; BUFFERING
+ LZD0 LZD1 LZD2 LZD3 LZD4 LZD5 LZD6 LZD7
+ ZD0 ZD1 ZD2 ZD3 ZD4 ZD5 ZD6 ZD7
+
+ C CLRBAR SEMO1 SEMO0 G1BAR G2BAR SL SR
+ ZD0 ZD1 ZD2 ZD3 ZD4 ZD5 ZD6 ZD7
+ D1A D1B D1C D1D D1E D1F D1G D1H OE
+ D0_GATE IO_ALS00
+ IO_LEVEL={IO_LEVEL}
+ LOGIC:
+
* BUFFERING:
+ C = { CLK_I }
+ CLRBAR = { CLRBAR_I }
+ SEMO1 = { SEMO1_I }
+ SEMO0 = { SEMO0_I }
+ G1BAR = { G1BAR_I }
+ G2BAR = { G2BAR_I }
+ SL = { SL_I }
+ SR = { SR_I }
+ ZD0 = { ZD0_B }
+ ZD1 = { ZD1_B }
+ ZD2 = { ZD2_B }
+ ZD3 = { ZD3_B }
+ ZD4 = { ZD4_B }
+ ZD5 = { ZD5_B }
+ ZD6 = { ZD6_B }
+ ZD7 = { ZD7_B }
+
* INTERMEDIATE TERMS:
+ SA = { ~(SEMO0 | ~CLRBAR) }
+ SB = { ~(SA | ~CLRBAR) }
+
+ S0S1 = { SB & SEMO1 }
+ S0/S1 = { SB & ~SEMO1 }
+ /S0S1 = { SA & SEMO1 }
+ /S0/S1 = { SA & ~SEMO1 }
+
* OUTPUTS:
+ D1A = { (S0/S1 & SR ) | (/S0S1 & LZD1) | (S0S1 & ZD0)
+ | (/S0/S1 & LZD0) }
+ D1B = { (S0/S1 & LZD0) | (/S0S1 & LZD2) | (S0S1 & ZD1)
+ | (/S0/S1 & LZD1) }
+ D1C = { (S0/S1 & LZD1) | (/S0S1 & LZD3) | (S0S1 & ZD2)
+ | (/S0/S1 & LZD2) }
+ D1D = { (S0/S1 & LZD2) | (/S0S1 & LZD4) | (S0S1 & ZD3)
+ | (/S0/S1 & LZD3) }
+ D1E = { (S0/S1 & LZD3) | (/S0S1 & LZD5) | (S0S1 & ZD4)
+ | (/S0/S1 & LZD4) }
+ D1F = { (S0/S1 & LZD4) | (/S0S1 & LZD6) | (S0S1 & ZD5)
+ | (/S0/S1 & LZD5) }
+ D1G = { (S0/S1 & LZD5) | (/S0S1 & LZD7) | (S0S1 & ZD6)
+ | (/S0/S1 & LZD6) }
+ D1H = { (S0/S1 & LZD6) | (/S0S1 & SL ) | (S0S1 & ZD7)
+ | (/S0/S1 & LZD7) }
+ OE = { G1BAR | G2BAR | (SEMO1 & SEMO0) }
*
U1 DFF(8) DPWR DGND $D_HI CLRBAR C
+ D1A D1B D1C D1D D1E D1F D1G D1H
+ LZD0 LZD1 LZD2 LZD3 LZD4 LZD5 LZD6 LZD7
+ $D_NC $D_NC $D_NC $D_NC $D_NC $D_NC $D_NC $D_NC
+ D0_EFF IO_ALS00
*
URegister3DLY PINDLY (10,1,17) PWR GND
+ LZD0 LZD1 LZD2 LZD3 LZD4 LZD5 LZD6 LZD7 LZD0 LZD7
+ OE
+ G1BAR G2BAR C CLRBAR SEMO1 SEMO0 SEMO0 ZD0 ZD1 ZD2 ZD3 ZD4 ZD5 ZD6 ZD7 SR SL
+ ZD0_B ZD1_B ZD2_B ZD3_B ZD4_B ZD5_B ZD6_B ZD7_B D0_O D7_O
+ IO_ALS00 MNTYMXDLY={MNTYMXDLY} IO_LEVEL={IO_LEVEL}
+
+ BOOLEAN:
+ ENABLE1 = { G1BAR!='1 & G2BAR!='1 }
+ ENABLE2 = { SEMO1!='1 | SEMO0!='1 }
+ DISABLE1 = { G1BAR!='0 | G2BAR!='0 }
+ DISABLE2 = { SEMO1!='0 & SEMO0!='0 }
+ CLOCK = { CHANGED_LH(C,0) }
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.