|
№ n/n |
Наименование и обозначение элемента |
№ n/n |
Наименование и обозначение элемента |
|||||
|
1 |
Элемент системы |
6 |
Блок дифференцирования |
|||||
|
2 |
Элемент сравнения |
7 |
Блок интегрирования |
|||||
|
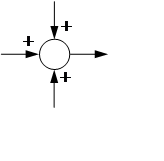
|
Сумматор |
8 |
Линия связи |
|||||
|
4 |
Блок перемножения
|
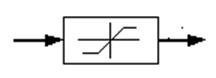
9 |
Нелинейные элементы
|
|||||
|
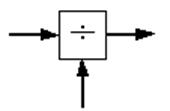
5 |
Блок деления
|
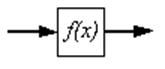
10 |
Функция
|
|||||
При составлении структурных схем должны выполняться следующие основные правила:
- структурная схема должна иметь входные и выходные внешние воздействия (внешние связи), задаваемые из физических соображений;
- каждое входное воздействие (входной сигнал), являющееся независимой функции времени, должно иметь только вход в систему;
- входной сигнал может замыкаться внутри структурной схемы и иметь в виде ответвления (замкнуться по выходной координате системы) или не замыкаться внутри структурной схемы (система, разомкнуться по выходному сигналу);
- все внутренние связи, определяемые системой управления, должны иметь вход и выход.
Составление структурной схемы САУ по заданной системе дифференциальных уравнений целесообразно проводить в следующей последовательности:
- система дифференциальных уравнений записывается в операторной форме;
- для каждого уравнения системы условно выбирается входная и выходная координаты;
- каждое уравнение решается относительно выходной координаты или члена, содержащего её старшую производную;
- строятся графические модели каждого из дифференциальных уравнений;
- строиться общая структурная схема САУ как совокупность графических отображений каждого дифференциального уравнения.
Следует отметить, что задача составления структурных схем может решаться неоднозначно, т.е. можно получить несколько вариантов графического изображения, но после соответствующих преобразований все изображения оказываются эквивалентны.
Кроме того, структурная схема рассматривается как схема прохождения и преобразования сигналов в САУ. Поэтому отдельные звенья структурной схемы не обязательно соответствуют определённым конструктивным элементам системы, т.е. отдельный конструктивный элемент может быть представлен несколькими типовыми звеньями, но иногда несколько элементов системы объединяются в одно типовое звено.
Пример 3.1. На рисунке 12 приведена автоматическая система стабилизации скорости вращения двигателя постоянного тока независимого возбуждения:
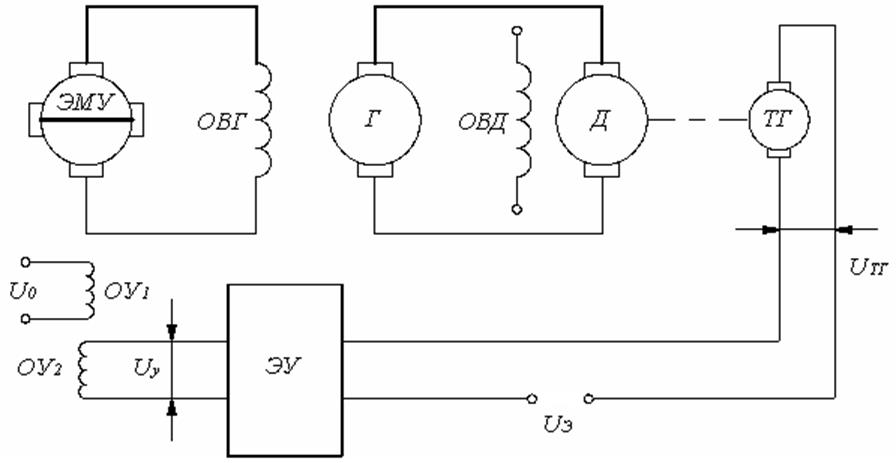
Рисунок 10. Автоматическая система стабилизации скорости вращения двигателя постоянного тока независимого возбуждения
Элементы схемы:
ОУ1 – задающая обмотка управления ЭМУ;
ОУ2 – управляющая обмотка ЭМУ;
Г – генератор;
ЭМУ – электромашинный усилитель поперечного поля;
Д – двигатель;
ТГ – тахогенератор;
U0 – задающее напряжение;
Uэ – напряжение сравнения;
ЭУ – электронный усилитель.
Составим структурную схему системы стабилизации, считая:
![]()
Решение: для двигателя уравнение равновесия моментов (2 закон Ньютона):
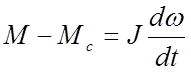 , (60)
, (60)
где ![]() – электромагнитный момент двигателя;
– электромагнитный момент двигателя;
![]() – момент нагрузки;
– момент нагрузки;
![]() –
момент инерции двигателя;
–
момент инерции двигателя;
![]() – магнитный поток двигателя;
– магнитный поток двигателя;
![]() –
конструктивный коэффициент двигателя.
–
конструктивный коэффициент двигателя.
Уравнение равновесия напряжений для якорной цепи двигателя:
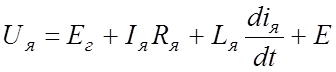 , (61)
, (61)
где ![]() -
против ЭДС двигателя;
-
против ЭДС двигателя;
Rя, Lя – сопротивление и индуктивность якорной цепи;
![]() –
ЭДС генератора;
–
ЭДС генератора;
Сг, Фг, wг – конструктивный коэффициент, магнитный поток и скорость вращения генератора.
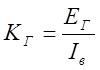 -
коэффициент передачи генератора.
-
коэффициент передачи генератора.
Генератор. Для цепи возбуждения генератора:
 , (62)
, (62)
где ![]() ,
,
![]() – сопротивление и индуктивность обмотки
возбуждения генератора;
– сопротивление и индуктивность обмотки
возбуждения генератора;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.