Линеаризацией называется замена реальных нелинейных уравнений близкими к ним линейными уравнениями. Линеаризация исходных нелинейных зависимостей основана на методе малых отклонений, сущность которого заключена в том, что динамические свойства звеньев и систем исследуется не во всем диапазоне изменения переменных, а вблизи их некоторых значений, соответствующих характерным режимам работы (например: установившемся режимам). Основой линеаризации является выдвинутое И.А. Вышнеградским предположение, что в течение всего процесса регулирования имеют место лишь достаточно малые отклонения всех измеряющихся параметров от их установившихся значений.
Линеаризация возможна, если:
§ отклонение переменных малы;
§ линеаризуемая функция аналитична, т.е. имеет конечные производные всех порядков в окрестности точки линеаризации.
Пусть
задано нелинейное дифференциальное уравнение звена САУ:
![]() .
(35)
.
(35)
Уравнение
для установившегося режима ![]() :
:
![]() .
(36)
.
(36)
Исходное нелинейное уравнение в отклонениях имеет вид:
![]() .
(37)
.
(37)
Разложив
левую часть уравнения в ряд Тейлора в окрестности точки установившегося режима ![]() , получим:
, получим:
 ,
(38)
,
(38)
где
 - частные производные в точки
установившегося режима;
- частные производные в точки
установившегося режима;
![]() - члены высшего порядка малости, состоящий
из произведения отклонений, степеней отклонений с коэффициентами в виде
смешанных частных производных и производных второго и высших порядков от F
по соответствующим аргументам.
- члены высшего порядка малости, состоящий
из произведения отклонений, степеней отклонений с коэффициентами в виде
смешанных частных производных и производных второго и высших порядков от F
по соответствующим аргументам.
Отбросив
нелинейный остаток ![]() , получим линейное
дифференциальное уравнение с постоянными коэффициентами, которые являются
результатом линеаризации исходного дифференциального уравнения.
, получим линейное
дифференциальное уравнение с постоянными коэффициентами, которые являются
результатом линеаризации исходного дифференциального уравнения.
При стандартной форме записи уравнений в ТАУ принято оставлять в левой части выходную величину и её производные, входная величина, её производные и другие величины (возмущения) переносятся в правую часть уравнения:
 ,
(39)
,
(39)
где
 .
.
Погрешность линеаризации оценивается величиной относительной погрешности:
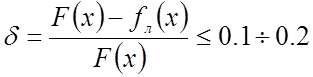 ,
(40)
,
(40)
где
![]() - исходная нелинейная функция;
- исходная нелинейная функция;
![]() - уравнение линеаризованной
характеристики.
- уравнение линеаризованной
характеристики.
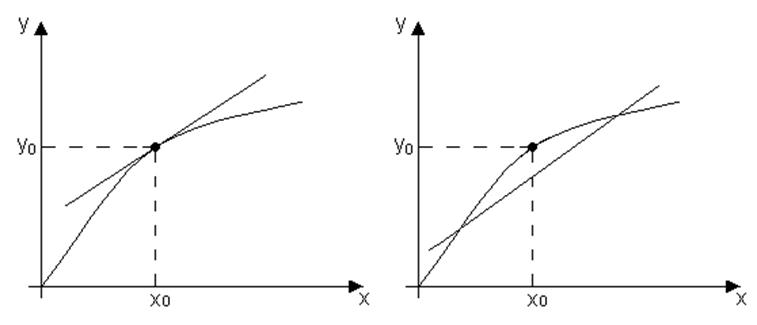 |
а) б)
Рисунок 5. Линеаризация нелинейной характеристики методом касательной (а) и методом секущей (б)
Пример
2.1. В окрестности точки установившегося режима ![]() аналитически линеаризовать нелинейное
уравнение
аналитически линеаризовать нелинейное
уравнение 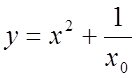 .
.
Решение.
Разложим уравнение ![]() в ряд Тейлора в окрестности
точки установившегося режима:
в ряд Тейлора в окрестности
точки установившегося режима:
 ,
(41)
,
(41)
где
 .
.
В точке установившегося режима:
 ;
;
 ;
;
 .
.
Таким образом:
![]() .
(42)
.
(42)
Ограничившись линейными членами разложения получим:
![]() .
(43)
.
(43)
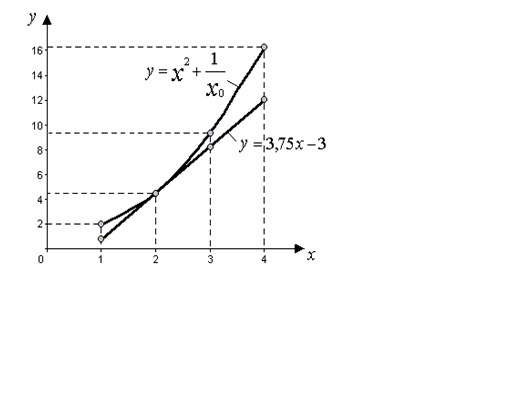
На рисунке 6. приведена линеаризация рассматриваемой нелинейной функции.
|
X |
1 |
2 |
3 |
4 |
|
Y |
2 |
4.5 |
9.3 |
16.25 |
|
X |
1 |
2 |
3 |
4 |
|
Y |
0.75 |
4.5 |
8.25 |
12 |
![]()
Рисунок 6. Линеаризация нелинейного уравнения методом касательной
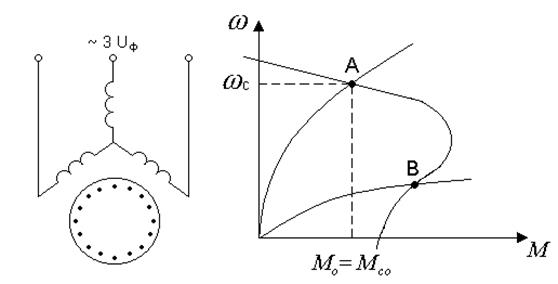 |
Рисунок 7. Схема включения и механическая характеристика АД с короткозамкнутым ротором
Рабочий механизм с вентиляторной характеристикой:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.