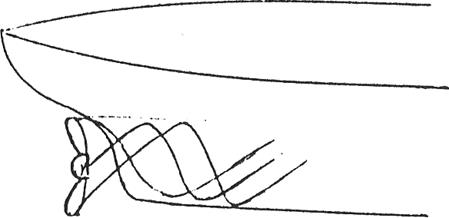
Руль судна в течение трех периодов у судна с ВФШ и двух периодов у судна с ВРШ находится в потоке винта, однако скорость его обтекания уменьшается по мере перехода к активному торможению, что снижает эффективность руля по сравнению с нормальным движением передним ходом. После достижения периода активного торможения поток винта меняет свое направление, изолируя руль от набегающего потока за счет движения судна,
делая его практически неэффективным. При этом после достижения кормовой
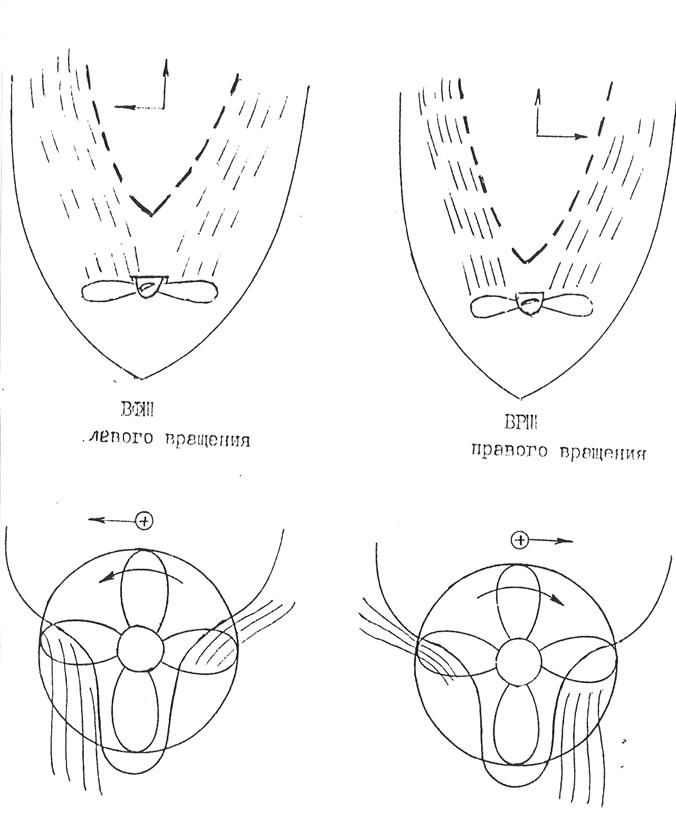
оконечности струя винта воздействует на корпус судна, образуя вследствие неравномерности его обтекания помимо повышения давления еще и поперечную нагрузку на кормовой оконечности (см. рис.).
Нужно запомнить следующее правило. Судно с ВФШ ( исходного правого направления вращения) будет отклоняться вправо вследствие того, что нагрузка от винтовой струи будет отклонять корму влево. Судно с ВРШ правого вращения будет отклоняться влево вследствие того, что нагрузка от винтовой струи стремится отклонить корму вправо
Траектория движения может быть определена из следующей системы дифференциальных уравнений:


 ,
,
где lii— присоединенные массы, m - масса судна,
Х,Y,M- проекции продольных и поперечных аэрогидродинамических сил и моментов, а также сил и моментов от действия ДРК и дополнительных нагрузок на корпусе судна.
Упрощенно дифференциальные уравнения выглядят следующим
образом.
Первого периода у судов с ВФШ и BPШ:
второго и третьего периода судов с ВФШ и второго периода судов с ВРШ:
Четвертого периода судов с ВФШ и третьего периода судов с ВРШ
![]() k1(1- t) r n2 D4 ; Mc=
k2(1-t) )
r n2 D5
k1(1- t) r n2 D4 ; Mc=
k2(1-t) )
r n2 D5
k1=f1 (lr ) ; k2=f2(lr ); lr= ,
,
где ![]() - коэффициент попутного потока; t - коэффициент засасываний;
- коэффициент попутного потока; t - коэффициент засасываний;
R(V) - сопротивление корпуса; n - частота вращения винта; D- диаметр винта; r - плотность воды; k1, k2 - коэффициент упора, коэффициент момента; lr - относительная поступь винта.
m1 = m + l11 .
18. Ходкость и управляемость судна в условиях мелководья и при движении в каналах
В результате влияния дна или стенок канала возрастают скорости обтекания поверхности судна (уравнение неразрывности, согласно которому в узкостях скорости выше). Увеличивается вязкостное сопротивление судна. При относительной глубине H/T > 4 это влияние незаметно, а при Н/T = 2,0 вязкостное сопротивление может увеличится на 10-15% по сравнению с его значением на глубокой воде.
Более существенно влияние мелководья на волновое сопротивление. Это связано с изменением картины волнообразования, которая зависит от скорости распространения волн на мелководье Vв = (gH)1/2 (Н - глубина, м). При скорости судна V< (0,3-0,4) Vвхарактер волнообразования на мелководье почти такой же, как на глубокой воде.
При увеличении скорости и приближении ее к критической (Vкр= (gH)1/2) носовая и кормовая системы волн разворачиваются перпендикулярно движению судна, образуя две поперечные волны значительной амплитуды. Возрастает дифферент судна на корму и его средняя осадка. При увеличении скорости свыше критической, судно отрывается от поперечных волн, скорость которых не превосходит (gH)1/2.
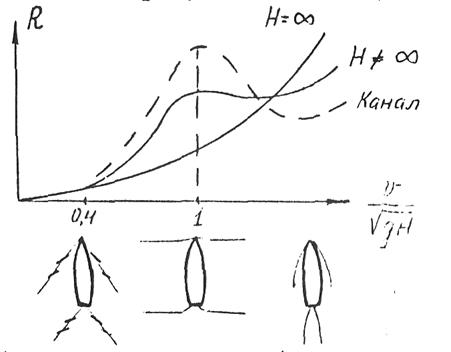
Волновое сопротивление судна резко падает. За судном остаются только веерообразные волны, обращенные выпуклостью по ходу судна. При движении в канале (см. пунктир на рисунке) все перечисленные особенности волнообразования выражены более ярко. При малых сечениях канала судно работает как поршень, толкая воду перед собой, при этом резко растет сопротивление судна и увеличивается дифферент. Поэтому скорость движения судов в каналах ограничена V £ 0,5 – 0,6 (gH)1/2.
При движении вблизи стенки канала появляется поперечная сила Yк , из-за работы винта сдвинутая к корме, и создает момент Мк , разворачивающий нос судна от стенки. Этот момент обычно парируется перекладкой руля. При увеличении скорости движения судна сила Yкначинает резко расти ( Yк@V2 ).
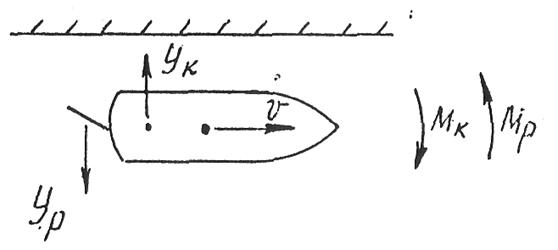
Руль приходится перекладывать на большие углы, что может привести к аварийным ситуациям, когда угла перекладки руля не хватит для удержания судна на прямом курсе. Для избежания этого явления необходимо ограничивать скорость движения судна в каналах.
Управляемость на мелководье хуже, чем на глубокой воде. Происходит это из-за увеличения скоростей обтекания судна на мелководье, что приводит к возрастанию всех сил на корпусе судна, в том числе боковых, зависящих от угла дрейфа и квадрата скорости. Боковая сила корпуса уравновешивает центробежную, возникающую при циркуляции судна. Последняя слабо зависит от глубины. Это приводит к тому, что при циркуляции на мелководье угол дрейфа судна становится меньше, чем на глубокой воде; только в этом случае боковая сила уравновесит центробежную.
Для большинства судов увеличение радиуса циркуляции судна на мелководье зависит только от относительной глубины Т/Н и может быть определено по приближенной формуле:
где Т - осадка; H- глубина; Rн=µ - радиус циркуляции на глубокой воде.
19. Диаграмма управляемости. Гидродинамический люфт. Построение диаграммы в натурных условиях. Влияние мелководья и посадки на диаграмму
Диаграммой
управляемости судна называется график изменения безразмерной угловой скорости
судна W = L/Rц![]() =
=![]() wL/ Vв
зависимости от угла перекладки руля a( L-длина судна; Rц - радиус циркуляции; V - скорость судна;
wL/ Vв
зависимости от угла перекладки руля a( L-длина судна; Rц - радиус циркуляции; V - скорость судна; ![]() w- угловая скорость). На рисунке 1 кривая 1 соответствует устойчивому
на прямом курсе судну, кривая 2 - неустойчивому, поскольку при нулевом угле
перекладки руля a= 0, судно уваливается в циркуляцию,
соответствующую точкам A и B . Чтобы выйти из циркуляции, необходимо переложить руль на
угол a > aкр.
При этом судно переходит
на циркуляцию противоположного борта. Диапазон +aкр ¸- -aкрхарактеризует "гидродинамический" люфт руля, когда
судно продолжает совершать циркуляцию на один борт, хотя руль переложен на
малый угол a½ aкр ½ противоположного
борта.
w- угловая скорость). На рисунке 1 кривая 1 соответствует устойчивому
на прямом курсе судну, кривая 2 - неустойчивому, поскольку при нулевом угле
перекладки руля a= 0, судно уваливается в циркуляцию,
соответствующую точкам A и B . Чтобы выйти из циркуляции, необходимо переложить руль на
угол a > aкр.
При этом судно переходит
на циркуляцию противоположного борта. Диапазон +aкр ¸- -aкрхарактеризует "гидродинамический" люфт руля, когда
судно продолжает совершать циркуляцию на один борт, хотя руль переложен на
малый угол a½ aкр ½ противоположного
борта.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.