Временное положение стробов uстр1 и uстр3 жестко связано с положением строба uстр2.
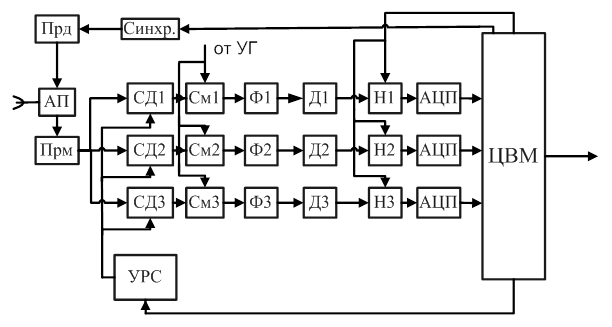
Рис. 30
Сигналы с выходов селекторов поступают на смесители См1-См3 и далее на узкополосные фильтры Ф1-Ф3. Преобразование принимаемых сигналов в смесителях осуществляется для того, чтобы не менять настройку узкополосных фильтров при изменении доплеровского смещения частоты принимаемых сигналов, обусловленных взаимным перемещением цели и носителя РЛС.
Для этого на вторые входы смесителей поступает сигнал с управляющего гетеродина (рис. 29), частота которого меняется в соответствии с изменением доплеровского смещения цели. Расположение стробов показано на рис. 31.
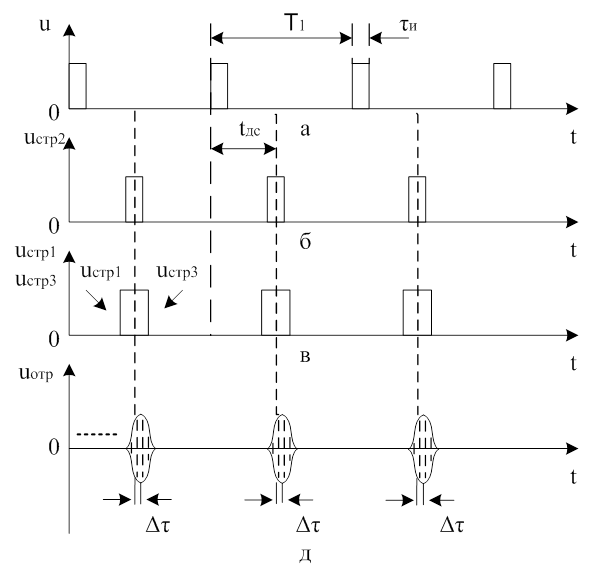
Рис. 31
Строб uстр2 (рис. 31, б) выставляется приблизительно в центре
частоты повторения, с периодом T1 (рис.
31, а), т.е. задержка uстр2
относительно зондирующих импульсов составляет .
По центру строба uстр2
расположены соприкасающиеся между собой стробы uстр1 и uстр3 (рис.31,
в). Расположение отраженного сигнала от цели относительно стробов uстр1 и uстр3
показано на рис. 31, д.
.
По центру строба uстр2
расположены соприкасающиеся между собой стробы uстр1 и uстр3 (рис.31,
в). Расположение отраженного сигнала от цели относительно стробов uстр1 и uстр3
показано на рис. 31, д.
На выходах СД1 и СД3 величина отраженного сигнала будет пропорциональна площади совпадения отраженного со стробами uстр1, uстр3. При симметричном расположении сигнала относительно указанных стробов, величина ошибки Δτ=0. За счет перемещения цели по дальности отражений сигнал сместится относительно стробов uстр1 и uстр3 и появляется ошибка Δτ за счет разной величины совпадения площадей сигнала и стробов. Эта ошибка проявляется в разной амплитуде импульсов на выходах СД1 и СД3.
За счет узкой полосы пропускания фильтров сигнал на их выходе растягивается в непрерывное гармоническое колебание. Амплитуды этих колебаний пропорциональны степени перекрытия принимаемого радиоимпульса с соответствующим стробом дальности. Сигналы с выхода фильтров, подаются на детекторы (Д1-Д3), а затем на управляемые некогерентные накопители, назначение которых аналогично накопителям при автосопровождении по скорости. Дальнейшая обработка производится в ЦВМ, куда подаются сигналы в цифровом виде с трех каналов дальности.
Обработка заключается в том, что по величине Δτ в ЦВМ вырабатываются сигналы, с помощью которых в УРС перемещаются стробы дальности в сторону, уменьшающую величину Δτ. Следовательно, перемещение стробов uстр1; uстр2; uстр3 позволяет следить за положением сигнала от цели.
Как только uстр2 сместится от центра Fп с периодом T1 на определенную величину, что определяется по значению tDc, производится смена частоты повторения на новую, с периодом T2, при котором строб uстр2 вновь находится приблизительно в центре периода T2.
Таким образом, изменение частоты повторения и слежение за положением цели позволяет производить автосопровождение при неоднозначном отсчете дальности и наличии слепых дальностей.
Структурная схема импульсно-доплеровской РЛС
Структурная схема бортовой РЛС приведена на рис. 32.
На структурной схеме показано
взаимодействие основных узлов импульсно-доплеровской РЛС. Режимы работы синхронизатора
(С) задаются бортовой ЦВМ. Приемник с усилителем промежуточной частоты (УПЧ)
имеет как минимум два идентичных канала: дальномерный и угломерный. С
угломерного канала поступает информация об угловых координатах цели в режиме
обзора и автосопровождения. Информация с дальномерного канала служит для 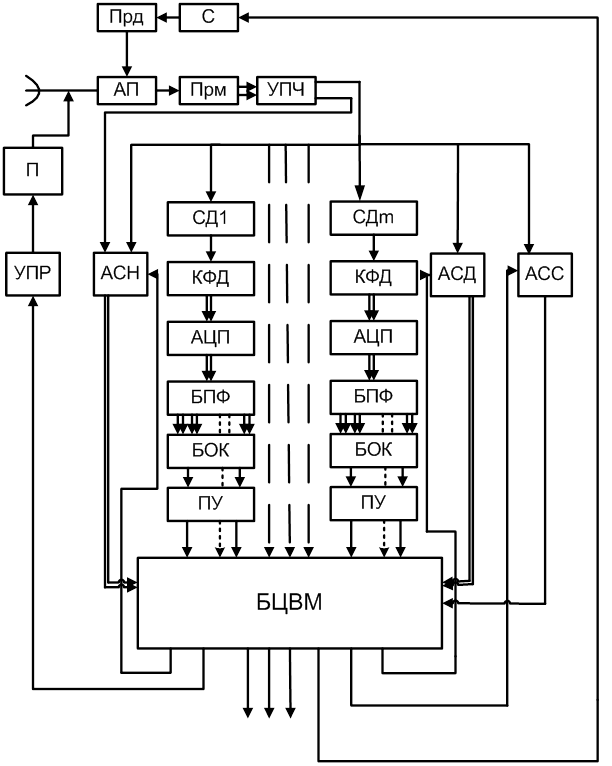
Рис. 32
обнаружения, измерения параметров цели в различных режимах.
Основная обработка производится в согласованном фильтре, состоящем из m временных каналов, каждый из m каналов состоит из селектора дальности (СД), квадратурных фазовых детекторов (КФД), АЦП, БПФ, блока объединения квадратур (БОК) и порогового устройства (ПУ). Двойной линией показана обработка в двух квадратурных каналах. Выходы ПУ, число которых определяется числом отраженных импульсов в пачке n, подключены к БЦВМ, где в соответствии с заложенными алгоритмами решаются задачи обнаружения, измерения параметров цели.
Системы автосопровождения по скорости (АСС), дальности (АСД), направлению (АСН) решают задачу сопровождения выбранной цели. Устройство управления (УПР) и привод (П) по информации с БЦВМ изменяют положение антенного устройства.
Перевод системы на автоматическое сопровождение цели осуществляется после режима обзора и захвата цели на автосопровождение.
Сканирование луча антенны можно осуществлять по строчному методу двумя циклами. Если четные и нечетные строки проходить лучом в противоположных направлениях, то частоту повторения от строки к строке можно менять с высокой на среднюю и наоборот. Циклы отличаются порядком изменения частоты повторения при переходе с четных на нечетные строки, так что за два цикла режимы ВЧП и СЧП используются для просмотра всего пространства, обеспечивая всеракурсное обнаружение целей.
Библиографический список
1. Бакулев П.А., Степин В.М. Методы и устройства селекции движущихся целей. М: Радио и связь, 1986. 286 с.
2. Справочник по радиолокации: Пер. с англ. Под ред. М.Сколника: В 4 т. Нью-Йорк, 1970.
3. Бакулев П.А. Радиолокационные системы. М: Радиотехника, 2004. 319 с.
4. Сосулин Ю.Г. Теоретические основы радиолокации и радионавигации: Учеб. пособие для вузов. М: Радио и связь, 1992. 304 с.
5. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. М: Радио и связь 1981. 416 с.
6. . Основы системного проектирования радиолокационных систем и устройств: Метод. указания по курсовому проектированию/ Рязан. гос. радиотехн. акад.; Сост.: В.И. Кошелев, В.А. Федоров, Н.Д. Шестаков. Рязань, 1995. 60 с.
Оглавление
1. Введение………………………………………………………….3
2. Методы и алгоритмы обработки сигналов
на встречных курсах……...…….………………………………..4
3. Оптимальная обработка сигналов
в импульсно-доплеровских РЛС………….................................8
4. Методы и алгоритмы обработки сигналов
на догонных курах……………………………………………..13
5. Выбор зондирующих сигналов в бортовых РЛС……….……………………………………………………...17
6. Обнаружение сигналов на фоне подстилающей
поверхности………….………………………………………….23
7. Измерение скорости цели в бортовых РЛС..............................29
8. Измерение дальности цели в бортовых РЛС…….…………...31
9. Автосопровождение цели в бортовых РЛС..............................41
10. Структурная схема импульсно-доплеровской РЛС………...45
11. Библиографический список…………………………………47
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.