Стробирование по дальности выполняется в
стробирующих каскадах, подключённых к выходу УПЧ, на которые подаются временные
стробы длительностью ![]() . Количество стробирующих
каскадов равно
. Количество стробирующих
каскадов равно ![]() .
.
Обработка по частоте Доплера в каждом временном канале производится на видеочастоте, в двух квадратурных каналах, где с помощью фазовых детекторов (ФД) полезная информация из фазы приходит в амплитуду. Для цифровой обработки необходимо информацию с выхода ФД преобразовать в цифровые коды, что выполняется с помощью аналого-цифровых преобразователей (АЦП).
Блок, обозначенный как БПФ, включает память на всю пачку отраженных импульсов и обработку в виде БПФ.
На выходе БПФ образуется ![]() частотных каналов, где
частотных каналов, где ![]() - число импульсов в пачке, отраженной
от цели. Полоса пропускания каждого доплеровского фильтра в этом случае будет
- число импульсов в пачке, отраженной
от цели. Полоса пропускания каждого доплеровского фильтра в этом случае будет
 . (5)
. (5)
В БПФ производится когерентное накопление
сигнала ![]() .
.
Объединение квадратурных каналов
производится в блоке объединения квадратур (БОК), причем объединение производится
для каждого частотного канала. Обнаружение полезного сигнала происходит на
выходах многоканального (![]() каналов)
порогового устройства (ПУ). Дальнейшая обработка в виде фиксации обнаружения и
измерения параметров цели производится в блоке определения параметров сигнала
(БОПС).
каналов)
порогового устройства (ПУ). Дальнейшая обработка в виде фиксации обнаружения и
измерения параметров цели производится в блоке определения параметров сигнала
(БОПС).
Величина порогового сигнала ![]() на выходе когерентного накопителя:
на выходе когерентного накопителя:
![]() ,
(6)
,
(6)
где  ,
, ![]() - отношение напряжения полезного
сигнала (
- отношение напряжения полезного
сигнала (![]() ) к среднеквадратическому значению
шума (
) к среднеквадратическому значению
шума (![]() ) на входе устройства обработки.
) на входе устройства обработки.
Структура фильтра, представленного на рис. 5, реально в цифровом виде выполняется на одном АЦП и спецпроцессоре с одним БПФ. Многоканальность по времени реализуется за счет разбиения по временным тактам работы АЦП и БПФ.
На рис. 6 приведены спектры соседних гармоник, отражен-ных
от пассивных помех, от цели и с учетом частотной харак-теристики согласованного
фильтра, выполненного в виде много-канального доплеровского фильтра,
показанного на рис. 4 для режима ВЧП: 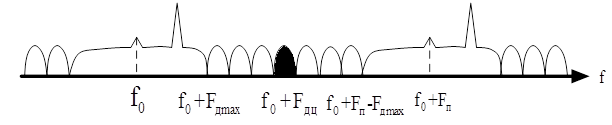
Рис. 6
Аналогичный спектр на рис. 7 представлен при выполнении многоканального доплеровского фильтра в виде БПФ, структурная схема которого показана на рис. 5.
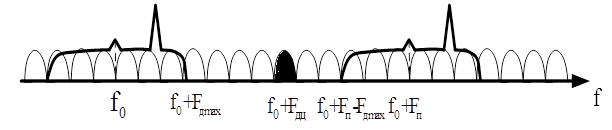
Рис. 7
Особенность обработки, показанной на рис.
6, состоит в том, что доплеровские фильтры расположены в зоне спектра,
свободного от пассивной помехи. При изменении скорости носителя РЛС меняется
положение точек ![]() , что приводит к изменению
зоны спектра, свободного от пассивных помех. В этом случае для перекрытия всей
зоны спектра, где может находиться полезный сигнал, следует производить
адаптивную привязку начала гребенки доплеровских фильтров к скорости носителя
РЛС (к точке
, что приводит к изменению
зоны спектра, свободного от пассивных помех. В этом случае для перекрытия всей
зоны спектра, где может находиться полезный сигнал, следует производить
адаптивную привязку начала гребенки доплеровских фильтров к скорости носителя
РЛС (к точке ![]() ).
).
В случае использования БПФ (рис. 7), по
ширине спектра пассивных помех ![]() рассчитывают
количество частотных каналов БПФ, в которых находится помеха, и эти каналы в обнаружении
полезного сигнала не участвуют.
рассчитывают
количество частотных каналов БПФ, в которых находится помеха, и эти каналы в обнаружении
полезного сигнала не участвуют.
Методы и алгоритмы обработки сигналов
на догонных курсах
Кроме режима, соответствующего встречным курсам, существует режим, когда полезная цель движется в одном направлении с носителем РЛС. Этот режим называется сближением с целью в задней полусфере или режимом догонных курсов. Это наиболее сложный режим, потому что отраженные от цели сигналы могут попадать в область доплеровских частот мешающих отражений и обнаружение происходит на фоне пассивной помехи.
Если скорость цели значительно превышает
скорость носителя РЛС, ![]() , при движении в
одном направлении, возможно обнаружение на фоне шума приемника, т.к. спектральные
составляющие цели могут лежать вне спектра отражений от подстилающей
поверхности и для обнаружения можно использовать режим ВЧП. Во всех остальных
случаях обнаружение производится на фоне мешающих отражений от земной поверхности.
, при движении в
одном направлении, возможно обнаружение на фоне шума приемника, т.к. спектральные
составляющие цели могут лежать вне спектра отражений от подстилающей
поверхности и для обнаружения можно использовать режим ВЧП. Во всех остальных
случаях обнаружение производится на фоне мешающих отражений от земной поверхности.
К чему приводит использование режима ВЧП в данной ситуации:
а) не используется участок спектра, свободный от пассивных помех по вышеприведенным причинам;
б) искусственно увеличивается интенсивность помех, связанных с альтиметровыми отражениями от земли.
Рассмотрим возникновение альтиметровых отражений.
В работе [2, т. 1] показано, что
суммарная интенсивность отражений от земной поверхности при углах, лежащих в
пределах ![]() от вертикального, практически одинакова.
Тогда протяженность альтиметровых отражений во временной области
от вертикального, практически одинакова.
Тогда протяженность альтиметровых отражений во временной области ![]() можно определить из прямоугольного треугольника,
задавшись высотой полета Н носителя РЛС:
можно определить из прямоугольного треугольника,
задавшись высотой полета Н носителя РЛС:
![]() .
(7)
.
(7)
Предположим, что высота полета носителя составляет H=20
км ![]() , тогда h=3 км и участок
дальности земной поверхности, занимаемый высотными отражениями, составляет
, тогда h=3 км и участок
дальности земной поверхности, занимаемый высотными отражениями, составляет
3 км.
Если частота повторения в режиме ВЧП составляет F=100 кГц (период повторения T=10 мкс), участок дальности, соответствующий периоду повторения, равен ΔD=1,5 км.
Сравнивая величины “![]() ” и ”
” и ”![]() ”,
видим, что протяженность альтиметровых отражений превышает длительность участка
земной поверхности, определяемого периодом повторения. Это приводит к искусственному
увеличению интенсивности уже значительных альтиметровых отражений. Это можно
пояснить осциллограммами, представленными на рис. 8.
”,
видим, что протяженность альтиметровых отражений превышает длительность участка
земной поверхности, определяемого периодом повторения. Это приводит к искусственному
увеличению интенсивности уже значительных альтиметровых отражений. Это можно
пояснить осциллограммами, представленными на рис. 8.
Устранение искусственного повышения мощности помех возможно за счет увеличения периода повторения Т или уменьшения частоты повторения РЛС.
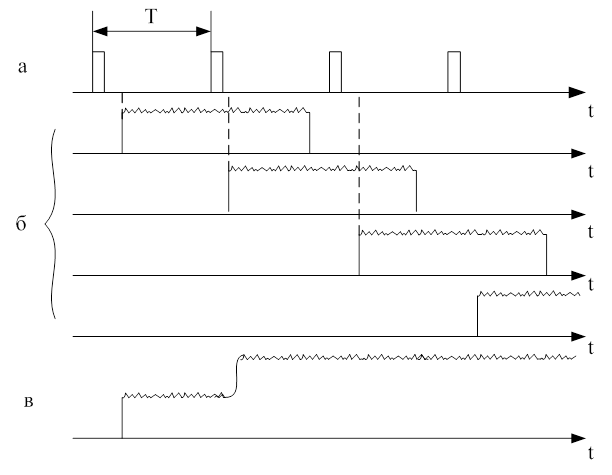 Рис. 8
Рис. 8
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.