![]() ;
;
![]() ;
;
![]() ,
,
где b1 - наименьшее положительное число, которое при умножении его m2m3 и делении на m1 дает 1 как остаток (то же справедливо и для остальных b).
После того, как m1, m2, m3 выбраны, можно вычислить дальность по уравнению (27), используя значения cк и номера стробов дальности A1,A2, A3, в которых обнаружена цель при трех измерениях.
К выбору частот повторения можно подойти исходя из точности определения однозначной дальности. Из формулы (25) видно, чем больше величина Δt, тем точнее измерение Dо. Величина Δt зависит от разности частот повторения ΔT=T2-T1. Увеличение ΔT приводит с одной стороны, к более точному измерению Dо, с другой - к уменьшению величины однозначной дальности.
Следовательно, величину ΔT следует выбирать из заданной дальности обнаружения при условии выполнения максимума величины Δt.
В устройстве обработки сигнала Δt
определяется как разность номеров параллельных каналов по дальности Nк, в которых произошло обнаружение сигнала при двух
частотах повторения Fп1 и Fп2, ![]() , где NКА
- номер канала с меньшей Fп (с большим периодом TA); NКВ
- номер канала с большей Fп (с меньшим TВ). Максимальная величина Δt при условии,
что число каналов по дальности равно m, определяется:
, где NКА
- номер канала с меньшей Fп (с большим периодом TA); NКВ
- номер канала с большей Fп (с меньшим TВ). Максимальная величина Δt при условии,
что число каналов по дальности равно m, определяется:
![]() . (28)
. (28)
Положительное число e выбирается таким образом, чтобы при смене частот повторений в большую или меньшую сторону отраженный сигнал от цели находился в (х+1)-м периоде повторения.
Частота повторения Fп1 выбирается из условия обнаружения цели. Рассчитывается число x по заданной дальности Dо:
![]()
Затем из условия Δtmax определяется ΔT:
![]() .
.
Частоты повторения ![]() и
и ![]() находятся
следующим образом:
находятся
следующим образом:
![]() (29)
(29)
Процедура измерения дальности заключается в следующем. Если на какой-то из частот повторения обнаружена цель, следующие два такта являются измерительными. Частоты повторения на измерительных тактах выбираются в зависимости от номеров каналов, в которых присутствует цель, таким образом, чтобы обеспечить измерения во всем диапазоне дальностей обнаружения.
Расчет дальности производится по номерам каналов в двух тактах с максимальной разностью периодов повторения.
Определяется разность номеров каналов:
![]() ,
,
определяется величина ![]() :
:
![]()
вычисляется однозначная дальность:
![]() (30)
(30)
Ошибка измерения дальностей ![]() :
:
![]() . (31)
. (31)
Автосопровождение цели в бортовых РЛС
Бортовая РЛС может сопровождать одиночную цель с использованием контуров слежения по скорости, дальности, угловым координатам или многие цели в режиме сопровождения при обзоре. Принципы автосопровождения по перечисленным координатам остаются практически классическими, но с некоторыми особенностями, присущими импульсно-доплеровским РЛС.
В режиме ВЧП и СЧП осуществляется обнаружение цели с использованием узкополосной фильтрации и доплеровская частота выбранной цели передается на автосопровождение по скорости. Структурная схема канала сопровождения по скорос-
ти
представлена на рис. 29. 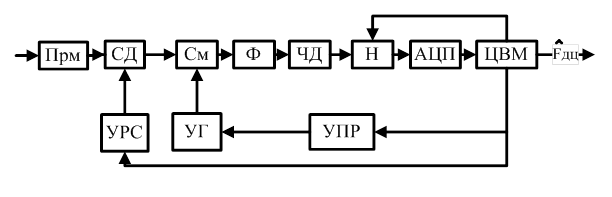
Рис. 29
С выхода приемника импульсные сигналы через селектор дальности (СД), осуществляющий автосопровождение по дальности с помощью устройств расстановки стробов (УРС), поступают на смеситель (См). На второй вход смесителя поступает сигнал с управляемого гетеродина (УГ). На выходе смесителя образуется сигнал с частотой fсм=fф±ΔFд, где fф - частота настройки узкополосного фильтра (Ф), ΔFд=Fдц-Fдуг, Fдуг -экстраполированное значение доплеровского смещения частоты полезного сигнала в управляемом гетеродине.
За счет узкополосной фильтрации на выходе фильтра сигнал имеет непрерывный вид. Если частота на выходе фильтра отличается от fф на величину ±ΔFд, пропорционально этой величине на выходе частотного дискриминатора (ЧД) появляется сигнал ошибки, который накапливается в управляемом некогерентном накопителе (Н). Накопление улучшает отношение сигнал/шум. Управление осуществляется тактовыми импульсами с ЦВМ. После АЦП сигнал ошибки поступает в ЦВМ, где обрабатывается в соответствии с выбранными алгоритмами, а затем через управитель (УПР) меняется частота управляемого гетеродина в сторону уменьшения величины ±ΔFд.
При автосопровождении по дальности возникают особенности, обусловленные неоднозначностью отсчета дальности до цели и наличием слепых дальностей, которые возникают из-за запирания приемника РЛС во время излучения зондирующих импульсов. Эти особенности требуют использования нескольких раздельных стробов дальности, что возможно при использовании нескольких каналов дальности. Каналы дальности по техническим характеристикам должны быть идентичны.
Ввиду высокого порядка неоднозначности РЛС должна справляться с возможностью потери цели при каждой слепой дальности. Автоматические системы сопровождения должны периодически возвращаться в режим обнаружения, если слепые дальности не могут быть обнаружены и если не принять предупредительные меры.
Наиболее рациональным решением является применение РЛС с несколькими частотами повторения, определяющей истинную дальность цели. После того, как определена истинная дальность цели, переключение частоты повторения импульсов устраняет влияние слепой дальности. Начало слепой дальности обнаруживается системой сопровождения по дальности, отмечающей момент, когда строб дальности начинает перекрывать зондирующий импульс. Тогда до того, как произойдет затенение цели за счет слепой дальности, производится переключение частоты повторения импульсов на новое значение. Так как сопровождение цели осуществляется по ее истинной дальности, никаких переходных процессов при этом не будет.
На рис. 30 приведена структурная схема канала сопровождения цели по дальности.
Сигнал с выхода приемника (Прм) подается на три селектора дальности (СД1-СД3). На вторые входы селекторов из устройства расстановки стробов (УРС) поступают сигналы стробов дальности uстр1; uстр2; uстр3. Строб uстр2 устанавливается по истинной дальности в середину неоднозначного периода повторения, соответствующим подбором частоты повторения. Определение истинной дальности основано на использовании стробов дальности uстр1 - uстр3. Так как число стробов мало, измерение истинной дальности с достаточной точностью основано на определении корреляционной функции между набором опорных дальностей, вырабатываемых в БЦВМ и набором измеренных неоднозначных дальностей при изменении частот повторения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.