Увеличение отношения q возможно путем снижения уровня мощности боковых лепестков и в некоторой степени уменьшением длительности зондирующего сигнала. При использовании процедуры БПФ в качестве устройства обработки необходимо увеличивать длительность отраженной пачки, что приведет к уменьшению величины Δf и, следовательно, и улучшению отношения сигнал/помеха. Это увеличение пачки импульсов возможно за счет изменения рабочего цикла антенны.
Измерение скорости цели в бортовых РЛС
Частота повторения в режиме ВЧП
импульсно-доплеровских РЛС выбирается из однозначного измерения скорости.
Процедура измерения скорости заключается в определении и запоминании номера “![]() ” доплеровского фильтра, в котором произошло
обнаружение цели. Измерение Fдц по величине “
” доплеровского фильтра, в котором произошло
обнаружение цели. Измерение Fдц по величине “![]() ” фильтра зависит от выполнения согласованного
фильтра.
” фильтра зависит от выполнения согласованного
фильтра.
При реализации в виде узкополосных доплеровских фильтров(рис. 4) Fдц определяется следующим образом:
![]() .
(17)
.
(17)
Если фильтр выполнен на основе БПФ (рис. 5), то.
![]() ,
(18)
,
(18)
где M - число каналов БПФ, в которых расположена помеха от земли.
В режиме СЧП доплеровская частота цели
может находиться в пределах  . Если Fдц< Fп, то
скорость цели измеряется однозначно, при Fдц>Fп и Fдц>-Fп измерить
истинное значение доплеровской частоты цели в режиме обнаружения нельзя. На
рис.22 показано три случая расположения цели с различными скоростями на
соседних гармониках спектра отражений от подстилающей поверхности.
. Если Fдц< Fп, то
скорость цели измеряется однозначно, при Fдц>Fп и Fдц>-Fп измерить
истинное значение доплеровской частоты цели в режиме обнаружения нельзя. На
рис.22 показано три случая расположения цели с различными скоростями на
соседних гармониках спектра отражений от подстилающей поверхности.
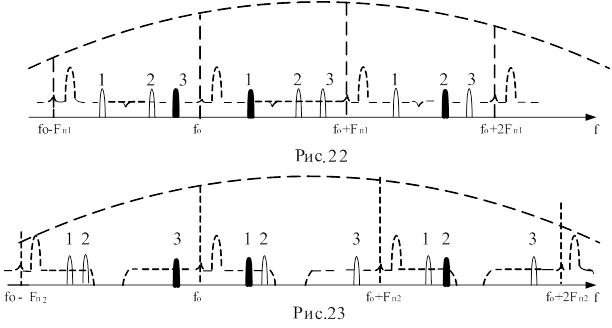 1- соответствует спектру отраженной цели
доплеровская частота которой Fдц< Fп, 2 -
соответствует спектру отраженной цели, у которой Fдц
1- соответствует спектру отраженной цели
доплеровская частота которой Fдц< Fп, 2 -
соответствует спектру отраженной цели, у которой Fдц![]() Fп, 3 - соответствует условию Fдц≥-Fп.
Fп, 3 - соответствует условию Fдц≥-Fп.
Для наглядности первая спектральная линия, соответствующая истинному положению цели по скорости, для всех трех случаев заштрихована.
Определение однозначной доплеровской частоты цели возможно после обнаружения цели, для чего необходимо ввести режим измерения скорости цели.
При обнаружении цели на частоте повторения Fп1 запоминается номер фильтра, в котором произошло обнаружение. Затем вводится режим измерения скорости цели, заключающийся в излучении зондирующего сигнала с другой частотой повторения Fп2, при условии Fп2> Fп1.
На частоте Fп2 обнаруживается цель и запоминается номер фильтра, содержащий полезный сигнал. При этом возможны три случая (рис. 23)
1. Однозначное значение доплеровской
частоты цели Fдц< Fп. Цель обнаруживается на частоте Fп2 в том же фильтре, что и на частоте Fп1. Величина Fдц определяется по номеру фильтра ![]() в соответствии с выражением (17).
в соответствии с выражением (17).
2. Однозначное значение Fдц![]() Fп. При изменении частоты повторения с Fп1 на Fп2 уменьшится номер фильтра, в котором произойдет
обнаружение на величину
Fп. При изменении частоты повторения с Fп1 на Fп2 уменьшится номер фильтра, в котором произойдет
обнаружение на величину  , и номер этого
фильтра будет равен
, и номер этого
фильтра будет равен 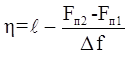 ,
(19)
,
(19)
а доплеровская частота цели
![]() .
(20)
.
(20)
3. Однозначная величина доплеровской
частоты цели Fдц>-Fп. Изменение частоты повторения с Fп1
на Fп2 приводит к увеличению номера фильтра, обнаруживающего
цель, на величину ,
 ,
,
а Fдц определяется
![]() . (21)
. (21)
Измерить доплеровскую частоту во всем диапазоне скоростей цели в режиме НЧП нельзя вследствие стробоскопического эффекта.
Измерение дальности цели в бортовых РЛС
Измерение дальности связано с устранением неоднозначности отсчета дальности в режиме ВЧП и СЧП.
Возможны три метода измерения дальности.
1. Использование “пачечной” вобуляции периода повторения.
2. Применение линейной частотной модуляции зондирующего сигнала.
3. Использование временного стробирования за период повторения.
Использование “пачечной” вобуляции периода повторения позволяет измерить однозначную дальность в режиме обнаружения сигнала. Для этого последовательность зондирующих импульсов излучается с двумя чередующимися периодами повторения T1 и T2, причем изменение периода с T1 на T2 происходит через время, соответствующее периоду однозначной дальности T (рис. 24, а)
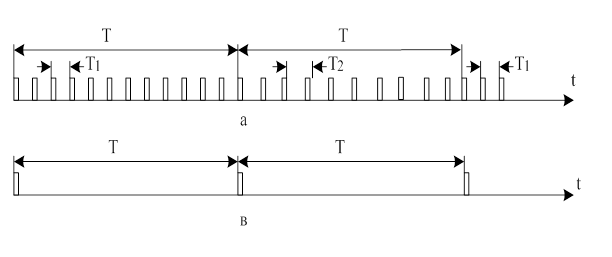
Рис. 24
Необходимое условие, чтобы интервал времени между крайними импульсами “условной” пачки точно соответствовал однозначному периоду T (рис. 24, в). Это условие выполняется, если частоты, соответствующие периодам T1 и T2, являются субгармониками частоты, соответствующей периоду T.
Принятую отраженную последовательность импульсов обрабатывают в соответствии с алгоритмом
![]() , (22)
, (22)
что реализуется структурной схемой, показанной на рис. 25.
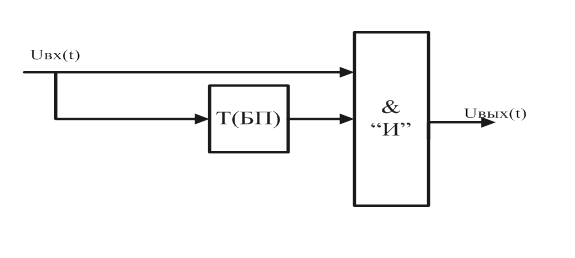
Рис. 25
В устройстве обработки (рис. 25) используется запоминание “условной” пачки на период T в блоке памяти (БП) и затем операция совпадения задержанной и не задержанной последовательности импульсов.
В результате на выходе схемы совпадения будут отраженные импульсы, соответствующие зондирующим, показанным на рис. 24, в т.к. все остальные импульсы “условных” пачек по времени не совпадают.
Проводя аналогичную обработку с зондирующей последовательностью импульсов и сравнивая ее с отраженной, можно определить величину задержки tD, определяющую однозначную дальность.
В импульсно-доплеровской РЛС использовать данный метод измерения дальности достаточно проблематично за счет узкополосной фильтрации по частоте. Однако известно его применение в РЛС данного класса, осуществляющих автосопровождение по дальности [2, т. 3].
Линейная частотная модуляция несущей частоты может быть использована для измерения дальности, особенно в РЛС с сопровождением при обзоре.
Измерение в данном методе производится в режиме измерения дальности, который включается после режима обнаружения цели. При обнаружении цели запоминается номер обнаруживающего доплеровского фильтра. Затем в режиме измерения несущая частота радиоимпульсов меняется по линейному закону (рис. 26).
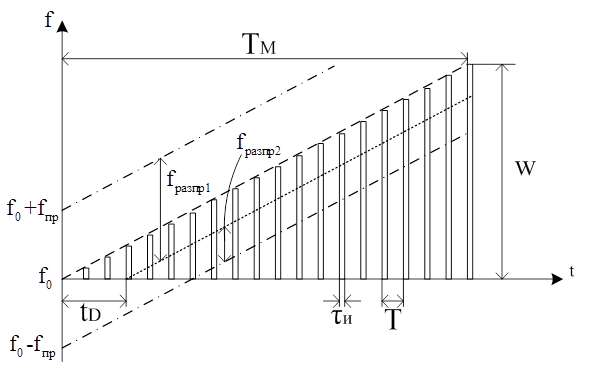
Рис. 26
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.