На рис. 8, а показана последовательность импульсов, излучаемых РЛС. На рис. 8, б представлены отражения от каждого зондирующего импульса, а на рис. 8, в – суммарные отражения в приемнике РЛС.
При уменьшении частоты повторения соотношение (2) не выполняется и возникают проблемы однозначного измерения и скорости, и дальности. Этот диапазон частот относится к режиму средних частот повторения (СЧП).
Частоту повторения в режиме СЧП
однозначно выбрать не удается. На ее выбор влияют многие факторы, основными из
которых являются альтиметровые отражения и отражения от земли по главному
лепестку. Обнаружить цель на фоне отражений по главному лепестку диаграммы
направленности практически не возможно. Поэтому ![]() следует
выбирать значительно больше ширины спектра, занимаемого главным лепестком, для
создания участка доплеровских частот, свободных от помех, по главному лепестку.
В режиме СЧП это условие выполняется практически всегда.
следует
выбирать значительно больше ширины спектра, занимаемого главным лепестком, для
создания участка доплеровских частот, свободных от помех, по главному лепестку.
В режиме СЧП это условие выполняется практически всегда.
Наиболее приемлемым является выбор ![]() , когда спектры отражений от
подстилающей поверхности соседних гармоник соприкасаются, т.е. fo +Fдmax=fo+Fп- Fдmax (рис. 9).
, когда спектры отражений от
подстилающей поверхности соседних гармоник соприкасаются, т.е. fo +Fдmax=fo+Fп- Fдmax (рис. 9).
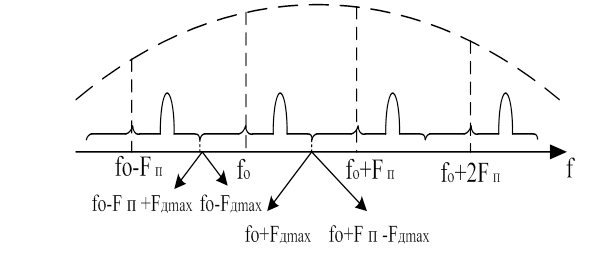
Рис. 9
Из этого условия минимальная частота повторения
 . (8)
. (8)
В режиме СЧП диапазон доплеровских частот сужается по сравнению с режимом ВЧП. За счет уменьшения Fп увеличивается скважность (до 10-30) и уменьшается число отраженных от цели импульсов пачки. Практический диапазон частот в этом режиме составляет десятки килогерц.
Структурная схема обработки аналогична приведенным на рис. 4 и 5. Различие заключается в увеличении числа временных каналов и уменьшения числа доплеровских фильтров в каждом временном канале.
Устранение мешающих отражений по главному лепестку диаграммы направленности при реализации структурной схемы обработки в виде многоканального доплеровского фильтра достигается тем, что гребенка фильтров в месте спектра помехи по главному лепестку(fо+Fдгл) не ставится.
Для соседних гармоник спектра, отраженных от пассивных помех это показано на рис. 10.
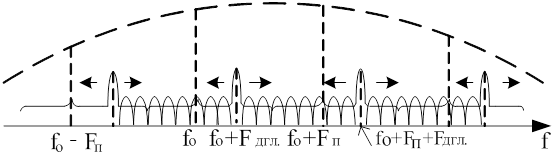
Рис. 10
При изменении положения Fдгл гребенка фильтров отслеживает это изменение.
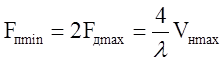
На рис. 11 показано расположение спектра
отражений соседних гармоник и гребенка фильтров, выполненных в виде БПФ. 
Рис. 11
Устранение помех по главному лепестку осуществляется тем, что по величине Fдгл определяются номера фильтров в которых находится эта помеха, и результаты на выходах этих фильтров при обнаружении не участвуют.
Выбор зондирующих сигналов в бортовых РЛС
Выбор или синтез радиолокационного сигнала может проводиться путем перебора различных сигналов и сравнения их функций неопределенности по выбранному критерию обнаружения. Как показано в работе [1], наиболее эффективным критерием качества является площадь взаимного перекрытия функции неопределенности сигнала и интенсивности распределения пассивных помех E(τ,Ω). При этом тот сигнал целесообразней, который обеспечивает наименьшую область перекрытия с функцией E(τ,Ω) и, следовательно, наибольшее отношение сигнал-помеха на выходе системы обработки.
Применительно к задаче обнаружения низколетящей цели бортовой РЛС нахождение точного выражения E(τ,Ω) - трудоемкая задача. Упростив задачу, можно определить достаточно точный вид функции E(τ,Ω) [1].
Аппроксимируем диаграмму направленности антенны, как принято ранее, главным лепестком и сферой боковых лепестков, причем главный лепесток наклонен в вертикальной плоскости и не совпадает с вектором скорости носителя РЛС. Тогда по боковым лепесткам будем принимать отражения от земли в пределах от минимальной дальности Dmin=H до Dmax, определяемой максимальной дальностью обнаружения, и Vmax=V, определяемой скоростью носителя. Причем нужно учесть, что наибольшая интенсивность отражений будет на малых дальностях, а наименьшая - на больших дальностях. Поэтому боковые лепестки дадут функцию распределения интенсивности помех на плоскости D,V, показанную на рис. 12.
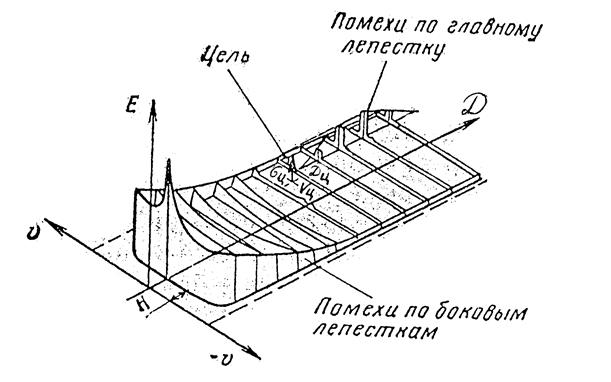
Рис. 12
Кроме того, мешающие отражения, принятые по главному лепестку, разместятся в плоскости D, V в виде возвышения, вытянутого по оси D. Там же показано положение эффективной площади рассеяния низколетящей цели σц с координатами Dц, Vц. Поперечные линии соответствуют кольцам дальности, о которых будет сказано далее.
На основании функции распределения помех (рис. 12) можно получить сечение функции E(τ,Ω) в плоскости τ,Ω, показанной на рисунке 13.
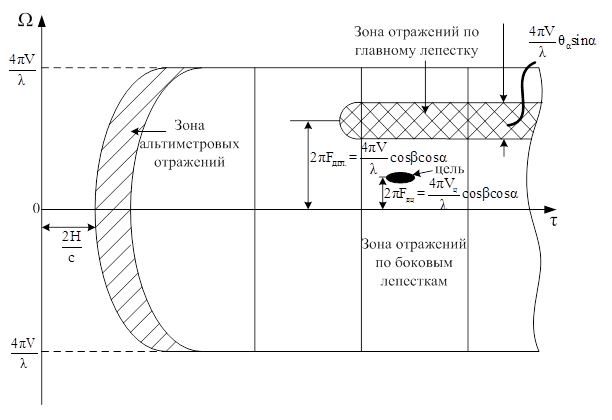
Рис. 13
На рис. 13: α - угол в азимутальной плоскости, b - угол в угломестной плоскости, θα - ширина диаграммы направленности главного лепестка на уровне 0.5.
При просмотре пространства главным лепестком область распределения помех по главному лепестку Eгл(τ,Ω) может изменять положение в пределах ±Ω по частоте и по τ в пределах от задержки по высоте τн до бесконечности в зависимости от положения главного лепестка относительно поверхности земли и вектора скорости носителя РЛС.
Для решения задачи выбора оптимального сигнала, максимизирующего отношение мощностей сигнала к помехам на выходе оптимальной системы обработки, необходимо добиться наименьшего перекрытия диаграммы неопределенности зондирующего сигнала и сечения функции распределения помех.
Процесс синтеза разбивается на два этапа: выбор целесо-
образной формы зондирующего сигнала по диаграмме неопределенности и выбор частоты повторения Fп в импульсно-доплеровской РЛС.
На рис. 14 показаны сечение функции распределения помех и варианты диаграмм неопределенности зондирующих сигналов с одинаковой энергией.
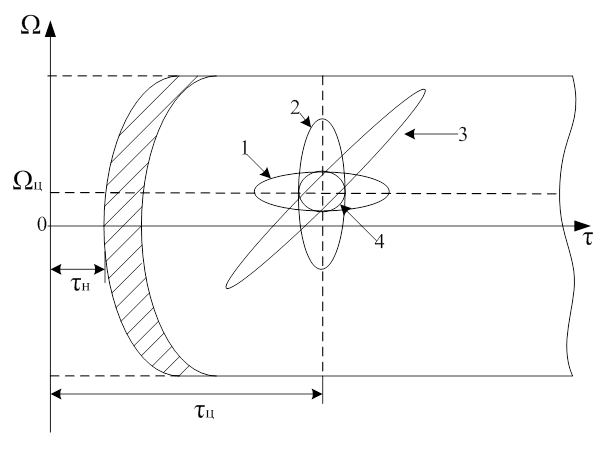
Рис. 14
На рис.: 1 - диаграмма неопределенности протяженного радиоимпульса, 2 - короткого радиоимпульса, 3 - сложного ЛЧМ- сигнала, 4 - сложного ФМ-сигнала.
Видно, что по заданному критерию наилучший зондирующий сигнал - это сложный ФМ-сигнал.
Из всех фазоманипулированных сигналов в импульсно-доплеровских РЛС наиболее подходящий - это сигнал на основе кода Баркера. Выбор частоты повторения представлен на рис. 15 - 17.
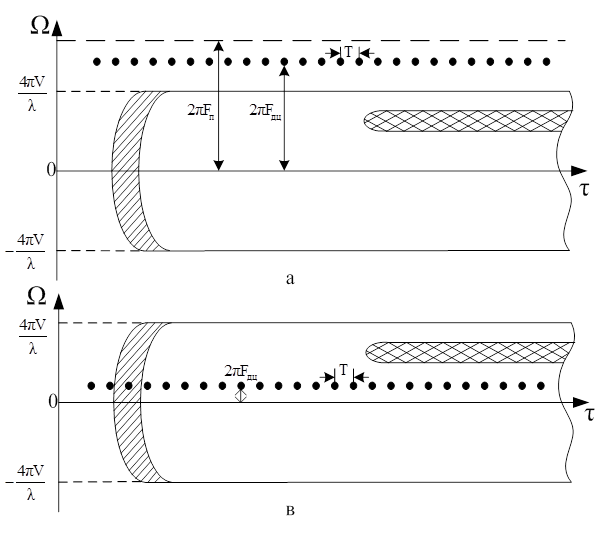
Рис. 15
На рис. 15, а показан правильный выбор Fп в режиме ВЧП. Функция неопределенности для полезного сигнала, которая выглядит как горизонтальная последовательность точек, и сечение функции распределения помех по площади не совпадают. Обнаружение сигнала от цели производится на фоне шума приемника.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.