Следует отметить, что спектр, аналогичный изображенному на рис. 2, будет и при отражении от объёмно-распределённых целей, таких как отражения от облаков, искусственных отражателей и т.д.
Из приведенного спектра отражений от подстилающей поверхности видно, что наиболее важным является выбор частоты повторения импульсов. Действительно, выбором Fп спектры соседних гармоник отражений от подстилающей поверхности можно перемещать в пределах от их слияния до образования свободных от помех спектральных зон, что позволяет в определенном режиме производить обнаружение полезных целей в зоне, свободной от пассивных помех.
Рассмотрим режим, когда полезная цель движется навстречу носителю РЛС. Этот режим называется сближением с целью в передней полусфере или режимом встречных курсов. Спектр соседних гармоник при отражении от земли и полезной цели показан на рис. 3.
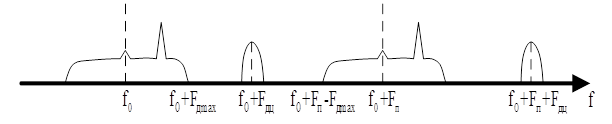 Рис. 3
Рис. 3
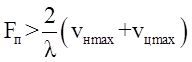
Для того чтобы спектр отражённых сигналов от цели находился в зоне, свободной от пассивных помех, необходимо выбрать Fп как
![]() , (1)
, (1)
где Fдmax – доплеровская частота, соответствующая максимальной скорости носителя.
Анализируя приведенное неравенство видим,
что неравенство в левой части при встречных курсах выполняется всегда, т.к.
точка спектра ![]() соответствует только
скорости носителя РЛС. Поэтому Fп следует
выбирать из правой части неравенства, соответствующей
соответствует только
скорости носителя РЛС. Поэтому Fп следует
выбирать из правой части неравенства, соответствующей
![]() ,
,
или через скорости движения
 , (2)
, (2)
где Vнmax – максимальная скорость носителя РЛС.
Выбор частоты повторения по соотношению (2) соответствует режиму работы с ВЧП. При этом Fп получается высокой (Fп≥100 кГц), а скважность излучения оказывается малой (чаще всего 4-6), что позволяет относить эти станции к классу РЛС, работающих в режиме малой скважности с высокой частотой повторения, или к классу квазинепрерывных РЛС. Число импульсов в отражённой пачке от цели получается большим, составляющим сотни импульсов.
В режиме ВЧП период повторения импульсов T в десятки раз может быть меньше времени распространения сигнала до цели и обратно.
В момент излучения импульса приёмник закрывается, что приводит к многократному его закрыванию в пределах, на которых обнаруживаются цели. Приход отражённого импульса, когда приёмник закрыт, приводит к его потере. Это явление носит название эффекта “слепых” дальностей, а длительность закрытия приёмника соответствует попаданию цели в слепую зону.
Размер каждой слепой зоны превышает длительность зондирующих импульсов на время восстановления чувствительности приёмника.
Учитывая, что за время наблюдения цель
изменяет свою дальность незначительно, приход отражённого импульса в момент
слепой зоны приводит к потере всей отражённой пачки от цели. Для уменьшения
эффекта “слепых” дальностей следует менять период повторения или частоту
повторения ![]() .
.
Таким образом, при обнаружении цели за время наблюдения необходимо использовать несколько частот повторения, смена которых производится через определённый временной интервал.
Оптимальная обработка сигналов
в импульсно-доплеровских РЛС
В режиме ВЧП обнаружение сигналов от целей ведется на фоне шума приёмника.
Отражённый сигнал от цели представляет пачку радиоимпульсов с неизвестной доплеровской частотой, которая подвергается когерентной обработке. Чтобы учесть доплеровский сдвиг частоты, широко используются гребенчатые фильтры, представляющие набор узкополосных фильтров, осуществляющих когерентное накопление.
Ожидаемую пачку импульсов (копию сигнала) ![]() можно представить в виде
произведения двух колебаний: последовательности видеоимпульсов
можно представить в виде
произведения двух колебаний: последовательности видеоимпульсов ![]() и высокочастотного колебания
и высокочастотного колебания ![]() несущей частоты
несущей частоты ![]() , модулированного огибающей пачки,
т.е.
, модулированного огибающей пачки,
т.е.
![]() ,
,
которое соответствует ожидаемому сигналу. Если
аддитивную смесь сигнала с шумом на входе приёмника обозначить ![]() , то отклик согласованного фильтра
даёт на выходе корреляционный интеграл
, то отклик согласованного фильтра
даёт на выходе корреляционный интеграл ![]() :
:
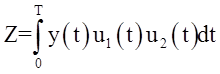 . (3)
. (3)
Из выражения (3) вытекает следующий
оптимальный алгоритм обработки пачки радиоимпульсов: принимаемая реализация
колебаний ![]() стробируется. При этом получается
колебание
стробируется. При этом получается
колебание ![]() . Стробирование необходимо осуществлять
в соответствии со временем запаздывания сигналов. При неизвестном времени
запаздывания необходима многоканальная схема. Каждый временной канал
относительно соседнего стробируется импульсной последовательностью, задержанной
на длительность одного импульса пачки
. Стробирование необходимо осуществлять
в соответствии со временем запаздывания сигналов. При неизвестном времени
запаздывания необходима многоканальная схема. Каждый временной канал
относительно соседнего стробируется импульсной последовательностью, задержанной
на длительность одного импульса пачки ![]() .
Тогда число временных каналов
.
Тогда число временных каналов ![]() в одном периоде
повторения
в одном периоде
повторения ![]() определяется как
определяется как  и соответствует величине скважности.
В каждом канале дальности необходимо осуществить накопление сигналов пачки,
т.е. вычислить интеграл (3). Интегрирование осуществляется узкополосным
фильтром.
и соответствует величине скважности.
В каждом канале дальности необходимо осуществить накопление сигналов пачки,
т.е. вычислить интеграл (3). Интегрирование осуществляется узкополосным
фильтром.
При неизвестной доплеровской частоте цели
в каждом стробируемом канале, число доплеровских фильтров должно быть таково,
чтобы перекрывать весь диапазон доплеровских частот, который в импульсных
системах, благодаря периодичности спектра, можно принять равным ![]() .
.
Таким образом, согласованный фильтр обработки имеет структуру, представленную на рис. 4.
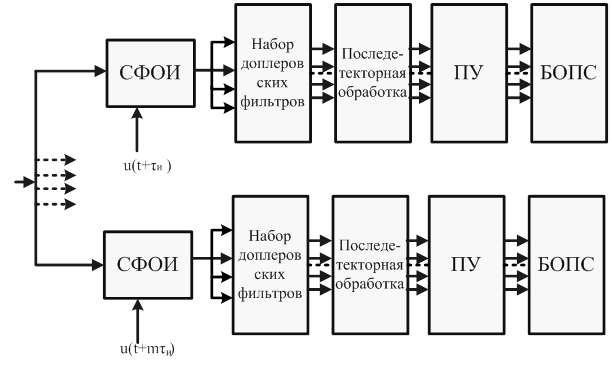
Рис. 4
Согласованные фильтры одиночного
радиоимпульса (СФОИ) стробируются по дальности, с числом временных сигналов ![]() . В каждом канале ставятся
узкополосные доплеровские фильтры, перекрывающие доплеровский диапазон целей,
где производится накопление сигнала. Детектирование огибающей сигнала
осуществляется в блоке последетекторной обработки, на выходе которого в
пороговом устройстве (ПУ) происходит сравнение с пороговым уровнем с целью
обнаружения сигнала. В блоке определения параметра сигнала (БОПС) определяются
параметры цели, такие как скорость, дальность и т.д.
. В каждом канале ставятся
узкополосные доплеровские фильтры, перекрывающие доплеровский диапазон целей,
где производится накопление сигнала. Детектирование огибающей сигнала
осуществляется в блоке последетекторной обработки, на выходе которого в
пороговом устройстве (ПУ) происходит сравнение с пороговым уровнем с целью
обнаружения сигнала. В блоке определения параметра сигнала (БОПС) определяются
параметры цели, такие как скорость, дальность и т.д.
При обнаружении цели определяется доплеровская частота цели по номеру доплеровского фильтра и рассчитывается скорость цели:
 .
(4)
.
(4)
Практически вместо СФОИ лучше использовать усилитель промежуточной частоты (УПЧ), параметры которого согласованны с параметрами сигнала, а узкополосные доплеровские фильтры выполнить в виде блока цифровой обработки, включающего память на всю пачку и обработку на основе быстрого преобразования Фурье (БПФ).
Тогда согласованный фильтр имеет структуру, представленную на рис. 5.
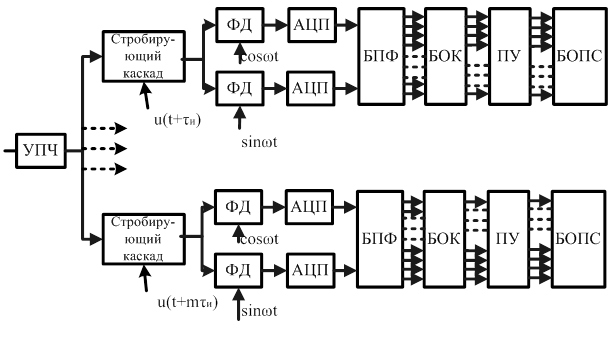 Рис. 5
Рис. 5
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.