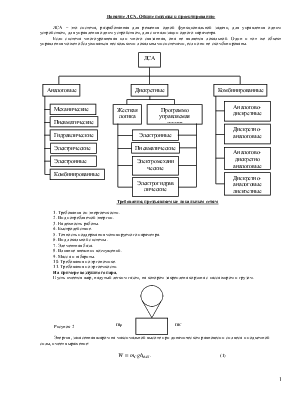
Понятие ЛСА. Общие подходы к проектированию
ЛСА – это система, разработанная для решения одной функциональной задачи, для управления одним устройством, для управления одним устройством, для сигнализации одного параметра.
Если система многоуровневая или много связанная, она не является локальной. Один и тот же объект управления может обслуживаться несколькими локальными системами, если они не скомбинированы.
 |
Рисунок 1
Требования, предъявляемые локальным сетям
1. Требования оп энергоемкости.
2. Вид потребляемой энергии.
3. Надежность работы.
4. Быстродействие.
5. Точность поддержания мотивируемого параметра.
6. Вид локальной системы.
7. Элементная база.
8. Влияние внешних возмущений.
9. Масса и габариты.
10. Требования по эргономике.
11. Требования по эргоемкости.
На примере воздушного пара.
Пусть имеется шар, надутый легким газом, на котором закреплена корзина с пассажиром и грузом.
 |
Рисунок 2
Энергия, запасенная шаром на максимальной высоте при динамическом равновесии сил веса и подъемной силы, имеет выражение:
![]() .
(1)
.
(1)
 |
Рисунок 3
 ,
(2)
,
(2)
 .
(3)
.
(3)
Второй пример с воздушным шаром.
Воздушный шар, который сбрасывает балласт.
 |
Рисунок 4
![]() .
(4)
.
(4)
 |
Рисунок 5
Вид потребляемой энергии
Аналоговые локальные системы
Современные системы представляют собой сложные динамические системы, обеспечивающие высокую точность отработки сигналов управления в условиях действия различных возмущений и помех.
Для получения заданных характеристик системы проектировщику приходится находить компромисс для решения, так как требования к точности и показателям качества переходных процессов исключающие.
Основной путь преодоления такого противоречия применения в системах элементов с большими коэффициентами усиления и корректирующих устройств перестраивающимися во времени параметрами.
Для описания современных систем наиболее удобен векторно-матричный аппарат, позволяющий создать единую компактную форму математического представления широкого класса.
Весь процесс проектирования систем делится на несколько этапов:
1. Построение математической модели объекта управления.
2. Зная физические процессы, происходящие в объекте, можно при определенных допущениях описать его поведение аналитически, чаще всего с помощью дифференциальных и разностных уравнений.
Структурная схема объекта управления выражается в виде матрицы, передаточных функций или графов.
Структурная схема с передаточными функциями являются достаточно громоздкими, но по ним можно выявить все внутренние связи и определить возможные места включения различных устройств компенсации.
По снятым экспериментальным характеристикам ОУ, можно упростить передаточную функцию объекта управления.
2. Выбор устройств изменяемой и неизменяемой части.
К неизменной части относятся исполнительные органы, измерительные устройства и т.д.
Элементы неизменяемой части выбирают не только с учетом требования точности и качества процессов, но и по надежности действия, а так же по массе, габаритным размерам и по стойкости влияния агрессивной среды.
Изменяемой части системы относятся электронные усилители, микропроцессоры и различные дополнительные средства компенсации сигналов, а также устройства коррекции динамических характеристик.
3. Решение задач анализа схемы.
Рассмотрим структуру анализа.
В этом случае инженер располагает полной структурной схемой системы, что на много упрощает проектирование.
При анализе проводится расчет и построение всех характеристик системы и проверка правильности выбора элементарной базы.
Задача синтеза сводится, в простейшем случае, к выбору типа и параметра последовательных, параллельных и последовательно-параллельных корректирующих устройств, обеспечивающих наиболее точное воспроизведение, регулируемых сигнал управления.
В результате решения в систему вводятся КУ. Они реализуются в виде РЦ фильтров или рабочих программ для микропроцессора.
4. Математическая модель корректирующего устройства.
Если результат моделирования соответствует техническому устройству, то на этом процесс проектирования заканчивается и составляется эскизный проект системы. На основании, которого выполняется техническое проектирование и проводится испытание.
Математические модели объектов управления
Для математической модели наиболее часто применяются дифференциальные, интегрально-дифференциальные уравнения, записанные по координатой или векторно-матричной форме.
Динамические элементы относятся к непрерывным, если рассматриваются в них и сигналы изменяются непрерывно.
В дискретных элементах процессы и системы имеют конечное число значений по величине и времени.
Максимальное описание элементов удобно выполнить через переменные состояния. Они аналогичны обобщенным координатам, а пространство их изменения является фазовым.
Обычно при описании элементов непрерывного действия
используют ![]() - переменное состояние,
- переменное состояние, ![]() - выходной сигнал,
- выходной сигнал, ![]() - входной сигнал.
- входной сигнал.
 (5)
(5)
 (6,7,8)
(6,7,8)
 (9,10)
(9,10)
Система (5) справедлива на заданном интервале времени и при заданных начальных условиях.
Система (5) считается не линейной, если кроме
нелинейных состояний ![]() , есть их производные
степени и транспортной функции.
, есть их производные
степени и транспортной функции.
Пример № 1. Уравнение устройства для замера угловых скоростей на выходе вала двигателя внутреннего сгорания.
 , (11)
, (11)
где
![]() - масса устройства,
- масса устройства,
![]() - перемещение
устройства,
- перемещение
устройства,
![]() - коэффициент
скоростного терния,
- коэффициент
скоростного терния,
![]() - коэффициент
жесткости пружины,
- коэффициент
жесткости пружины,
![]() - угловая
скорость выходного вала,
- угловая
скорость выходного вала,
![]() - коэффициент
пропорциональности при угловой скорости.
- коэффициент
пропорциональности при угловой скорости.
Обозначим:
![]() ,
(12)
,
(12)
![]() ,
(13)
,
(13)
получим:
 . (14)
. (14)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.