double duration; // переменная, в которую запишем время обработки
int i;
for( i=0;i<N;i++)
x[i]=sin(N*2*3.14159*Td*i); // получаем текущий элемент массива х
printf("Numbers of count N=5000\n");
start = clock(); // запоминаем время начала обработки
for(i=16;i<N;i++)
{
for(int k=0;k<=16;k++)
{
y[i]+=b[k]*x[i-k];
}
for(int k=0;k<=16;k++)
{
y[i]-=a[k]*y[i-k];
}
}
finish = clock(); // время завершения
duration = (double)(finish - start) / CLOCKS_PER_SEC; // записываем в переменную время обработки
printf( "Filtering Time=%2.5f seconds\n", duration ); // вывод времени обработки
printf( "Done!\n" );
sleep( (clock_t)4 * CLOCKS_PER_SEC );
};
Будем оценивать время обработки одного отсчета (Т) в режиме реального времени с выводом времени выполнения на экран. А так же определим максимальную частоту (fmax), которую способен обрабатывать цифровой фильтр на базе данного компьютера. Она будет обратно пропорциональна времени обработки одного отсчета, так как если подавать сигнал чаще, чем происходит обработка, то в режиме реального времени данная система не будет успевать за входным сигналом.
Рис.18. Работа программы: при N=2000 отсчетов время фильтрации сигнала=16 мсек
Рис.19. Работа программы: при N=5000 отсчетов время фильтрации сигнала=31 мсек
Рис.20. Работа программы: при N=10000 отсчетов время фильтрации сигнала=47 мсек
Рис.21. Работа программы: при N=20000 отсчетов время фильтрации сигнала=62 мсек
Рис.22. Работа программы: при N=50000 отсчетов время фильтрации сигнала=63 мсек
При запуске программы на компьютере с процессором Intel Pentium D 3.06 ГГц мы получаем следующие результаты:
|
Количество отсчетов (N) |
Общее время (t), сек. |
Время обработки одного отсчета (Т), мкс |
Максимальная частота (fmax), кГц |
|
2000 |
0,016 |
8 |
125 |
|
5000 |
0,031 |
6,2 |
161,3 |
|
10000 |
0,047 |
4,7 |
125 |
|
20000 |
0,062 |
3,1 |
322 |
|
50000 |
0,063 |
1,26 |
793,65 |
Табл. 2. Результаты выполнения программы.
Т = время обработки всех отсчетов/количество отсчетов
Т = t/N;
fmax =1/T;
Для реальной работы данного фильтра на данной системе надо подавать сигналы, так что бы они в любом случае обрабатывались, а это значит, что для оценки общей fmax надо из всех экспериментов выбрать наихудший: fmax = 125 КГц – максимальная обрабатываемая частота цифровым фильтров.
* для более точного определения fmax стоило бы провезти тестирование большее количество раз.
Заключение
В ходе данной работы был спроектирован цифровой полосовой БИХ-фильтр Баттерворта, со следующими характеристиками:
§ Нижняя частота среза - 2 кГц,
§ Верхняя частота среза - 8 кГц
§ Нижняя граничная частота полосы задерживания– 1,247 кГц,
§ Верхняя граничная частота полосы задерживания – 11 кГц,
§ Минимальное ослабление в полосе задерживания – 40 дБ,
§ Минимальное ослабление в полосе пропускания – 2 дБ,
§ Частота дискретизации – 40 кГц.
В качестве метода проектирования был выбран метод билинейного преобразования, относящийся к методам с использованием аналогового прототипа. Он был использован в проектировании в виду его простоты и качеств результирующих фильтров.
В результате проделанной работы удалось разработать фильтр с достаточно хорошей амплитудно-частотной характеристикой, у которой практически нет отклонения АЧХ от 0 в полосе пропускания, неравномерность в полосах задерживания удовлетворяет заданной. Такой результат был достигнут из-за того, что порядок фильтра достаточно высок. Поэтому ФЧХ далека от идеальной, она нелинейная.
Для получения полосового фильтра с лучшей АЧХ необходимо нижнюю и верхнюю граничные частоты задерживания взять равными 1,2 кГц и 8,8 кГц соответственно, частоту дискретизации равной 20 кГц. Остальные характеристики оставить неизменными. При этом порядок фильтра останется равным 16, а полученный фильтр будет иметь АЧХ более близкую к АЧХ идеального фильтра.
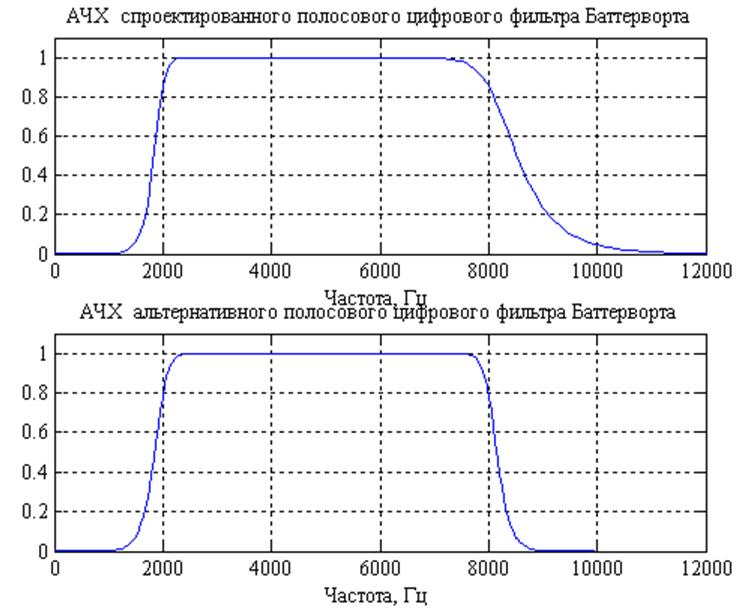
Рис.23. Графики АЧХ спроектированного и альтернативного ПФ Баттерворта.
Тестирование, приведенное в этой работе показало, что спроектированный фильтр удовлетворяет условиям определенным в задании. Фильтр пропускает сигналы с частотами в пределах от 2000 до 8000 Гц, и подавляет гармоники с частотами, выходящими за эти пределы.
Список литературы
1. Голышев Н.В., Щетинин Ю.И. Задачник – практикум по теории и обработке сигналов: Учеб. пособие. – Новосибирск. Изд-во НГТУ, 2001. – Ч.2. – 80 с.
2. Голышев Н.В., Щетинин Ю.И. Теория и обработка сигналов: Учеб. пособие. – Новосибирск. Изд-во НГТУ, 1998. – Ч.2. – 115 с.
3. http://matlab.exponenta.ru/index.php
4. Сергиенко А.Б. Цифровая обработка сигналов. – СПб.: Питер, 2003. – 608 с.: ил.
5. Белодедов М.В.Методы проектирования цифровых фильтров: Учебное пособие.
Волгоград: Изд-во Волгоградского государственного университета, 2004. – 64 с.
dsp-book.narod.ru/methodNF.pdf
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.