Вторую группу методов расчета рекурсивных фильтров составляют так называемые прямые методы расчета в z-плоскости, основанные на выборе полюсов и нулей фильтра, обеспечивающих необходимый вид его амплитудной характеристики.
Наконец, к третьей группе методов расчета БИХ-фильтров относятся так называемые методы оптимизации, обеспечивающие минимум ошибки между аппроксимирующей и заданной характеристиками фильтра. [2].
В данной работе использовался метод, относящийся к методам, основанных на использовании аналоговых прототипов, а именно: метод билинейного преобразования. Этот метод применяется наиболее часто ввиду его простоты и качеств результирующих характеристик фильтров. Достоинством метода билинейного преобразования является то, что передаточная функция цифрового фильтра определяется с помощью простых формул из передаточной функции аналогового фильтра, для которых существуют подробные таблицы и справочники. Еще одним достоинством этого метода по сравнению с другими методами преобразования аналоговых фильтров в цифровые (инвариантности импульсной характеристики и согласованного z-преобразования) выделяют то, что данный метод обеспечивает построение такого БИХ-фильтра, выходной сигнал которого приближенно совпадает с выходным сигналом аналогового фильтра-прототипа при одинаковых произвольных входных сигналах.
Метод билинейного преобразования основан
на использовании конформного преобразования р-плоскости с помощью
функции  (1)
(1)
где
![]() – положительная константа.
– положительная константа.
При переходе от ПФ аналогового фильтра к ПФ цифрового фильтра используется следующее выражение:
Соответствие между частотами аналогового
фильтра W и w цифрового фильтра
следует из подстановки в выражение (1) ![]() и,
где
и,
где ![]()
![]() –
интервал дискретизации. При такой подстановке:
–
интервал дискретизации. При такой подстановке:  Эквивалентное
выражение
Эквивалентное
выражение  Отсюда
Отсюда  Преобразование
Преобразование
![]() является нелинейным, но оно близко
к линейному при небольших w. Частота среза
является нелинейным, но оно близко
к линейному при небольших w. Частота среза ![]() аналогового
прототипа соответствует частоте среза
аналогового
прототипа соответствует частоте среза ![]() цифрового
фильтра. По значениям
цифрового
фильтра. По значениям ![]() и
и ![]() можно
вычислить постоянную
можно
вычислить постоянную ![]() .
.
Если аналоговый фильтр нормализован и ![]() то
то  При
этом
При
этом 
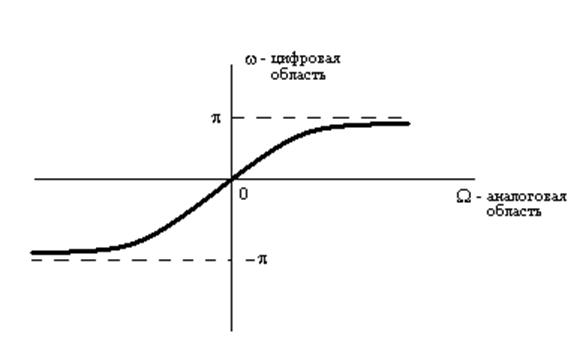
Рис. 2. Связь между частотами аналоговой и цифровой областей.
Как видно из рис. 2. связь между частотами аналоговой и цифровой областей – нелинейная. Чтобы использовать билинейное преобразование, необходимо исходные частоты цифрового фильтра преобразовать в частоты аналогового фильтра – деформация частот, преобразование в частотной области.
Рассмотренное билинейное преобразование (1) позволяет получить передаточную функцию цифрового фильтра из передаточной функции аналогового фильтра [1].
Проектирование фильтра
Итак, как было сказано выше, проектирование целевого фильтра будет осуществляться методом билинейного преобразования. Данный метод проектирования можно разбить на три этапа:
1. Получение спецификации аналогового фильтра на основе спецификации цифрового фильтра.
2. Проектирование аналогового фильтра (прототипа).
3. Трансформация аналогового фильтра в цифровой.
Проектирование требуемого цифрового фильтра осуществляется в среде MatLab 6.5 фирмы The MathWorks, Inc.
Для начала нужно задать характеристики идеального полосового фильтра (ПФ) с требуемыми в задании характеристиками, который мы, собственно, и будем использовать для получения нужного нам цифрового полосового БИХ-фильтра Баттерворта.
Спецификация цифрового фильтра:
Fs1=1200; %Гц
Fp1=2000; %Гц
Fp2=8000; %Гц
Fs2=11000; %Гц
Ft=40000; %Гц
Rs=40; %Дб
Rp=3; %Дб
Определение нормированных частот:
ws1 = 2*pi*Fs1./Ft % [pад/с]/отсч
wp1 = 2*pi*Fp1./Ft % [рад/с]/отсч
wp2 = 2*pi*Fp2./Ft % [рад/с]/отсч
ws2 = 2*pi*Fs2./Ft % [рад/с]/отсч
ws1 = 0.18849555921539
wp1 = 0.31415926535898
wp2 = 1.25663706143592
ws2 = 1.72787595947439
Дальнейшее проектирование заключается в вычисление граничных частот аналогового фильтра:
Ws1 = 2*Ft*tan(ws1/2)
Wp1 = 2*Ft*tan(wp1/2)
Wp2 = 2*Ft*tan(wp2/2)
Ws2 = 2*Ft*tan(ws2/2)
Ws1 = 7562.226494342564
Wp1 = 12670.75522596290
Wp2 = 58123.40224042886
Ws2 = 93667.96528900311
Проверка условия геометрической симметрии:
SimWs = Ws1*Ws2= 7.083383687796589e+008
SimWp =Wp1*Wp2= 7.364674026886579e+008
Как видно, что условие геометрической симметрии не выполняется, и, значит, возникает необходимость корректировать граничные частоты в полосе задерживания:
W_s1=Wp1*Wp2./Ws2
F_s1=(Ft*(2*atan(W_s1/2/Ft)))/2/pi
Ws1=W_s1
if(Ws1*Ws2==Wp1*Wp2)
msgbox('Условие геометрической симметрии выполняется!','Внимание!');
end
В результате корректировки нижней частоты задерживания получаем:
W_s1 = 7.862532301372850e+003
F_s1 = 1.247354988752664e+003
При корректировке нижней частоты задерживания получаем наилучший результат (Fs1=1247 Гц), так как улучшается вид АЧХ. При корректировке верхней частоты задерживания получили бы F_s2=1.124406275304836e+004, что делает получаемую АЧХ более отдаленной от АЧХ идеального фильтра.
Ширина полосы пропускания:
BW = Wp2-Wp1
BW = 4.545264701446596e+004
Центральная частота полосы пропускания:
W0 = sqrt (Wp1*Wp2)
W0 = 2.713793291112383e+004
2. Проектирование аналогового прототипа
Расчет нормированного ФНЧ:
Определение граничной частоты полосы задерживания:
Omega_s = (Ws2-Ws1)/(Wp2-Wp1))
Omega_s = 1.88779837091383
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.