























1.1. Эквивалентные преобразования нелинейных элементов
В структурных схемах нелинейный элемент представляют в виде прямоугольника с внесением в него либо статической характеристики, либо функциональной зависимости выходной величины у от входной величины х. Для однозначной нелинейной - y=F(x) Для неоднозначных нелинейностей у – зависит не только от величины входного сигнала x, но и от направления (т.е. производной) y= F( x, pх) .
Преобразование нелинейных САУ имеют свои особенности. Они обусловлены тем, что для них не выполняется принцип суперпозиции и правило коммутативности, т.е.
![]()
Не все правила структурных преобразования выполняются для нелинейных САУ, например:
· сумматор нельзя переносить через нелинейное звено;
· нельзя менять местами линейное и нелинейное звенья и др.
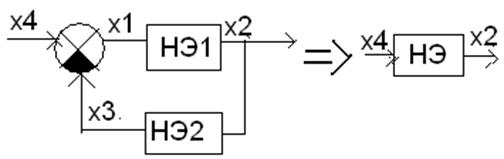
Преобразование НСАУ заключается в преобразовании линейных звеньев, стоящих с одной стороны и с другой от нелинейного элемента.
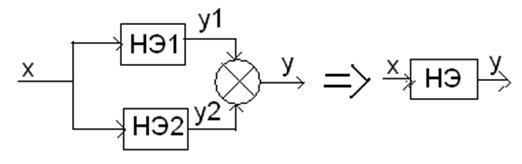
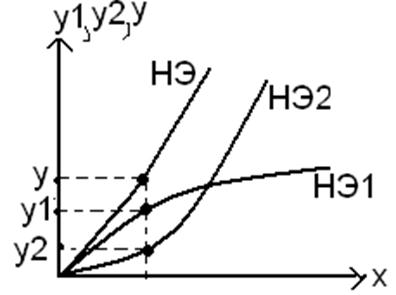
Пусть нам даны статические характеристики НЭ, необходимо найти эквивалентную характеристику.
1. Складываем статические характеристики НЭ1 и НЭ2
2. Последовательное соединение

3.
 Обратная связь
Обратная связь
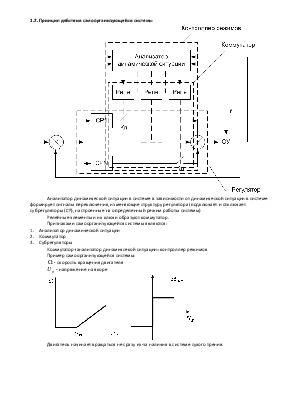
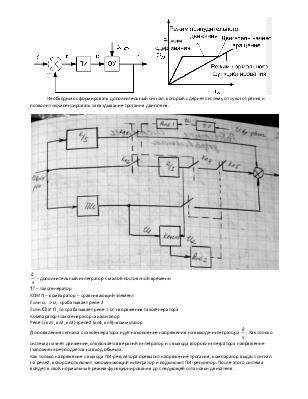
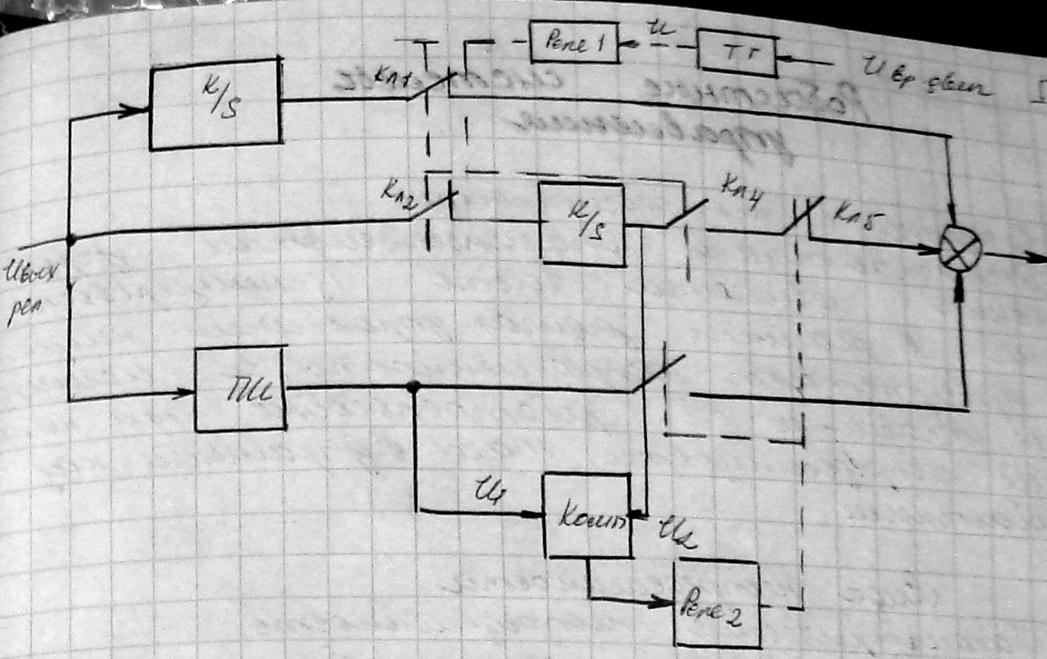
1.2. Принцип действия самоорганизующейся системы
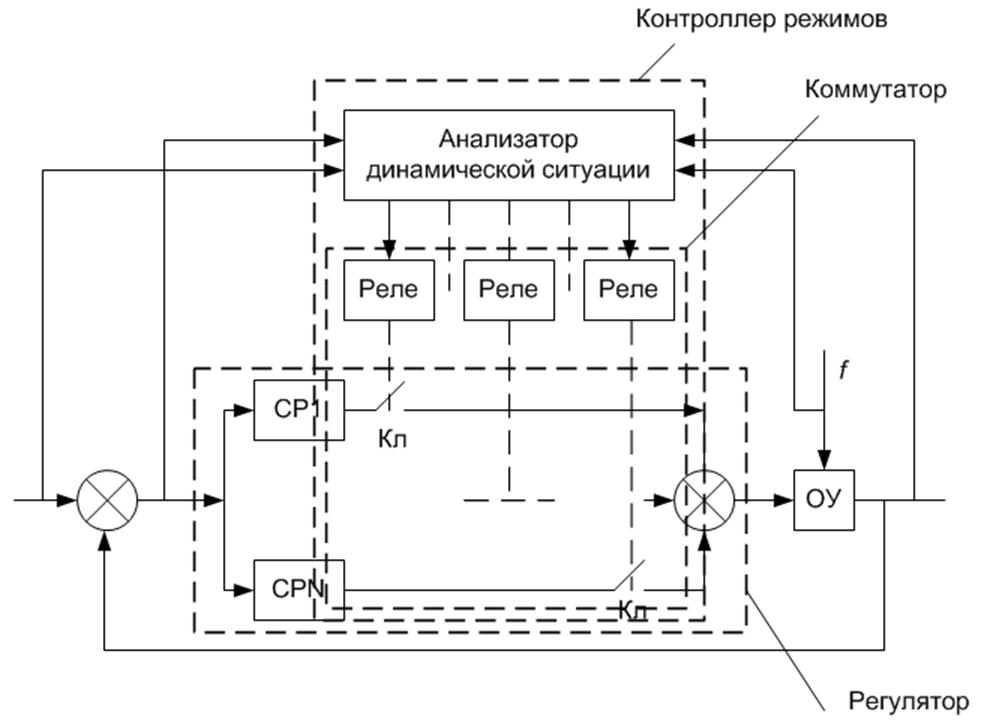
Анализатор динамической ситуации в системе в зависимости от динамической ситуации в системе формирует сигналы переключения, изменяющие структуру регулятора (подключает и отключает субрегуляторы (СР), настроенные на определенный режим работы системы)
Релейные элементы и их ключи образуют коммутатор.
Признаками самоорганизующейся системы являются:
1. Анализатор динамической ситуации
2. Коммутатор
3. Субрегуляторы
Коммутатор+анализатор динамичсекой ситуации=контроллер режимов
Пример самоорганизующейся системы:
![]() - скорость
вращения двигателя
- скорость
вращения двигателя
![]() - напряжение на
якоре
- напряжение на
якоре
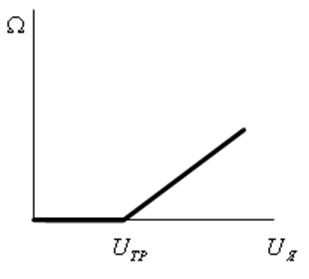
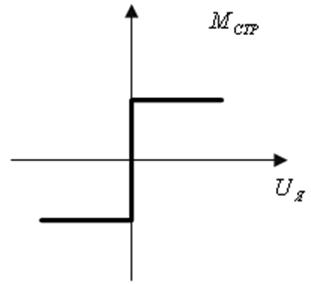
Двигатель начинает вращаться не сразу из-за наличия в системе сухого трения.
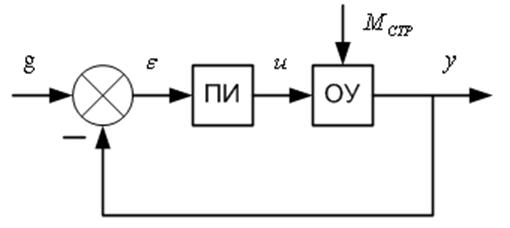
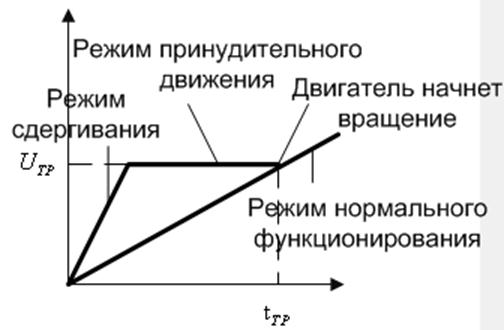
Необходимо сформировать дополнительный сигнал, который сдернет систему от сухого трения и позволит скомпенсировать запаздывание трогания двигателя.
![]() - дополнительный интегратор с малой
постоянной времени
- дополнительный интегратор с малой
постоянной времени
ТГ – тахогенератор
КОМП – компаратор – сравнивающий элемент
Если ![]() срабатывает реле 2
срабатывает реле 2
Если ![]() , то срабатывает реле 1 от напряжения
тахогенератора
, то срабатывает реле 1 от напряжения
тахогенератора
Компаратор+тахогенератор=анализатор
Реле1 (кл1, кл2, кл3)+реле2 (кл4, кл5)=коммутатор
До появления сигнала с тахогенератора идет накопление напряжения на
выходе интегратора ![]() . Как только система начнет
движение, отключается верхний интегратор и с выхода второго интегратора
напряжение (запомненное) подается на вход объекта.
. Как только система начнет
движение, отключается верхний интегратор и с выхода второго интегратора
напряжение (запомненное) подается на вход объекта.
Как только напряжение с выхода ПИ-регулятора превысит напряжение трогания, компаратор выдаст сигнал на реле2, которое отключит запоминающий интегратор и подключит ПИ-регулятор. После этого система войдет в свой нормальный режим функционирования до следующей остановки двигателя.
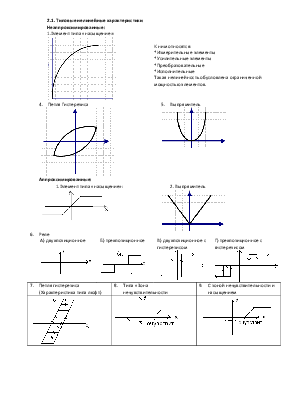
2.1. Типовые нелинейные характеристики
Неаппроксимированные:
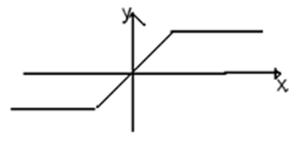
1.Элемент типа «насыщение»:
К ним относятся:
*Измерительные элементы
*Усилительные элементы
*Преобразовательные
*Исполнительные
Такая нелинейность обусловлена ограниченной мощностью элементов.
|
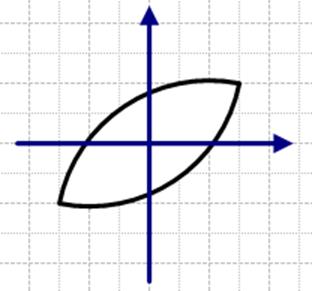
4. Петля Гистерезиса |
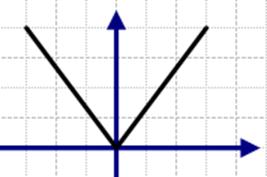
5. Выпрямитель |
|
|
|
Аппроксимированные:
|
1.Элемент типа «насыщение»: |
2. Выпрямитель |
|
|
|
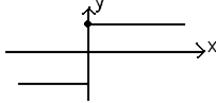
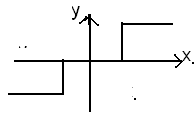
6. Реле
|
А) двухпозиционное |
Б) трехпозиционное |
В) двухпозиционное с гистерезисом |
Г) трехпозиционное с гистерезисом |
|||
|
|
|
|
|
|||
|
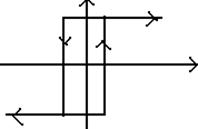
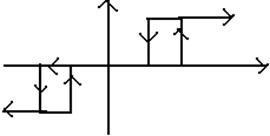
7. Петля гистерезиса (Характеристика типа люфт) |
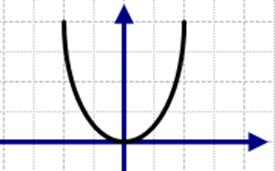
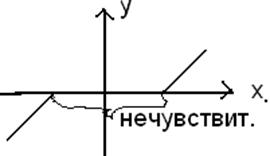
8. Типа «Зона нечувствительности |
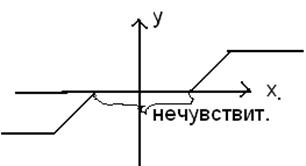
9. С зоной нечувствительности и насыщением |
||||
|
|
|
|
||||
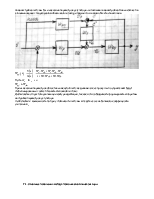
2.2. Самонастраивающиеся системы со стабилизацией частотных характеристик
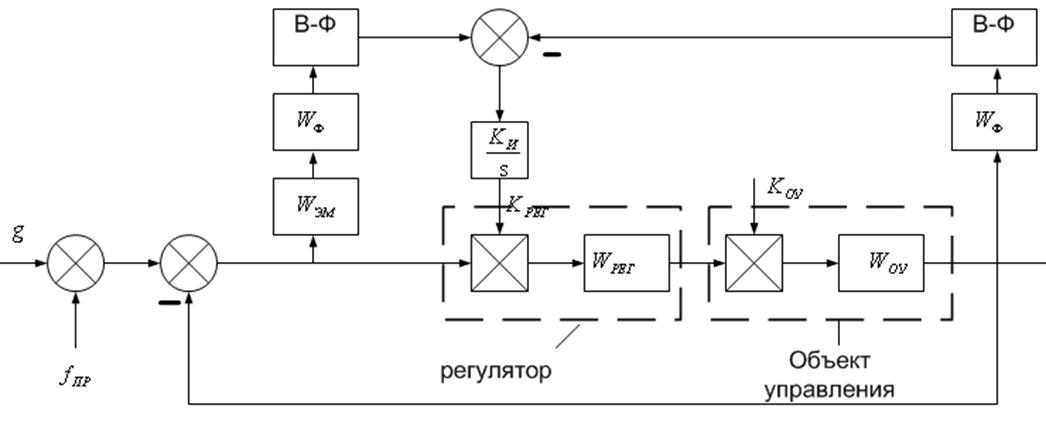
![]() - эталонная модель разомкнутой САУ
- эталонная модель разомкнутой САУ
![]() - режекторный фильтр
- режекторный фильтр
В-Ф – выпрямитель, который из синусоидального сигнала делает постоянный сигнал
![]()
![]()
![]()
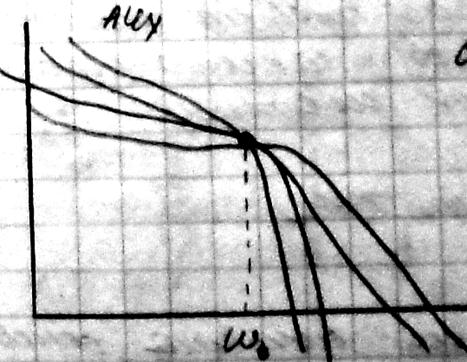
Стабилизацию частотных характеристик
легче выполнить путем стабилизации АЧХ, так как она легче измеряется. Для
стабилизации АЧХ на частоте ![]() (стабилизация
одной точки частотной характеристики) необходимо подать на вход системы
специальный сформированный сигнал.
(стабилизация
одной точки частотной характеристики) необходимо подать на вход системы
специальный сформированный сигнал.
![]()
Условие: ![]() на
на ![]()
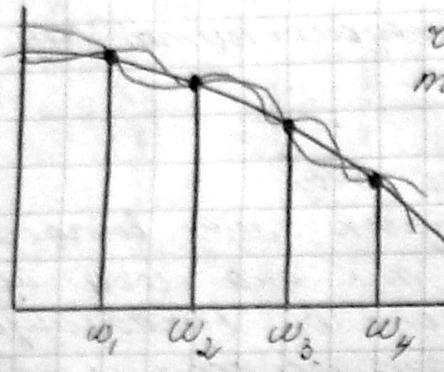 Характеристики,
проходящие через точку
Характеристики,
проходящие через точку ![]() называют эталонными.
называют эталонными.
Чем больше точек стабилизации, тем ближе реальная система к эталонной.
Реализация адаптивной системы с самонастройкой на ![]() частот требует наличие соответственно
частот требует наличие соответственно
![]() каналов самонастройки, что
значительно усложняет систему.
каналов самонастройки, что
значительно усложняет систему.
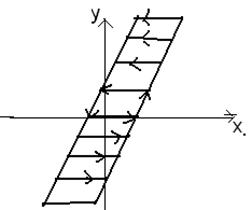
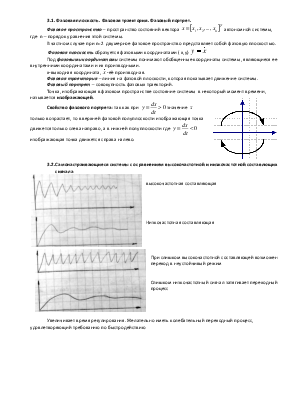
3.1. Фазовая плоскость. Фазовая траектория. Фазовый портрет.
Фазовое пространство – пространство
состояний вектора ![]() автономной системы, где n – порядок уравнения этой системы.
автономной системы, где n – порядок уравнения этой системы.
В частном случае при n=2 двумерное фазовое пространство представляет собой фазовую плоскостью.
Фазовая плоскость образуется
фазовыми координатами ( x,y) ![]()
Под фазовыми координатами системы понимают обобщенные координаты системы, являющиеся ее внутренними координатами и их производными.
x-выходная координата, ![]() -её производная.
-её производная.
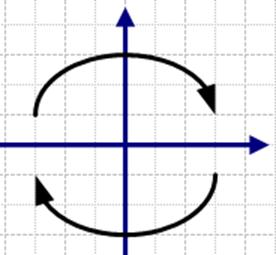
Фазовая траектория – линия на фазовой плоскости, которая показывает движение системы.
Фазовый портрет – совокупность фазовых траекторий.
 Точка, изображающая в
фазовом пространстве состояние системы в некоторый момент времени, называется изображающей.
Точка, изображающая в
фазовом пространстве состояние системы в некоторый момент времени, называется изображающей.
Свойство фазового портрета: так как при  значение
значение ![]() только
возрастает, то в верхней фазовой полуплоскости изображающая точка движется
только слева направо, а в нижней полуплоскости где
только
возрастает, то в верхней фазовой полуплоскости изображающая точка движется
только слева направо, а в нижней полуплоскости где  изображающая
точка движется справа налево.
изображающая
точка движется справа налево.
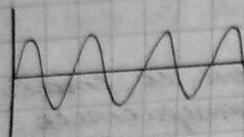
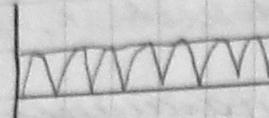
3.2. Самонастраивающиеся системы со сравнением высокочастотной и низкочастотной составлющих сигнала
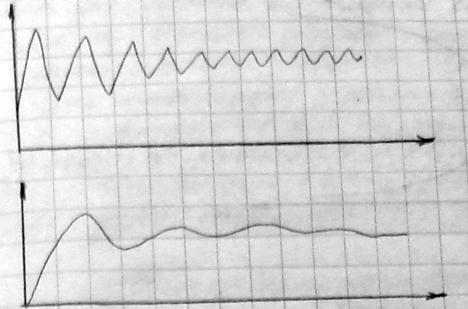
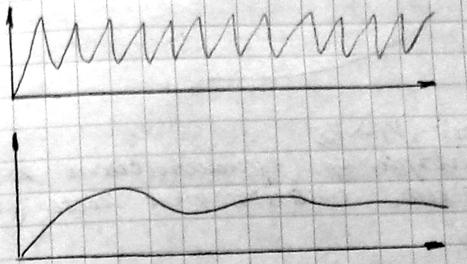 высокочастотная составляющая
высокочастотная составляющая
Низкочастотная составляющая
При слишком высокочастотной составляющей возможен переход в неустойчивый режим
Слишком низкочастотный сигнал затягивает переходный процесс
Увеличивает время регулирования. Желательно иметь колебательный переходный процесс, удовлетворяющий требованию по быстродействию
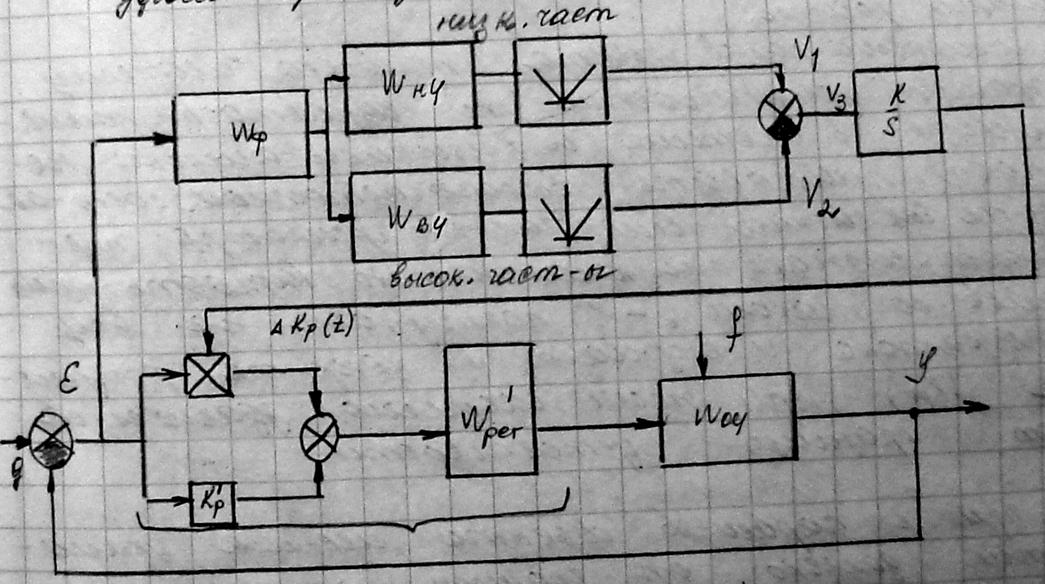
![]()
![]()
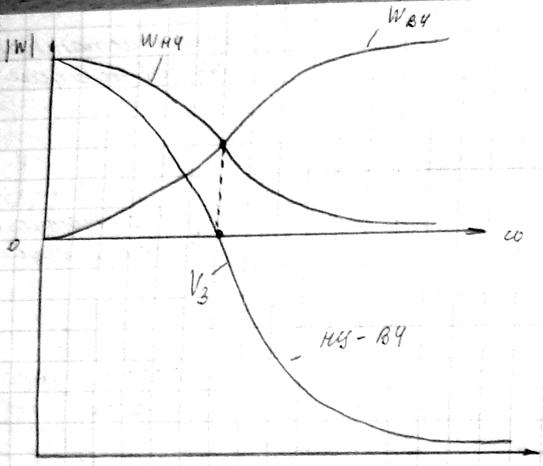
Низкие частоты: ![]()
![]() , интегратор увеличивает коэффициент
передачи. Система становится более чувствительной.
, интегратор увеличивает коэффициент
передачи. Система становится более чувствительной.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.