Балаковский институт техники, технологии и управления
Факультет инженерно-строительный
Кафедра Управление и информатика в технических системах
по дисциплине
ЭЛЕКТРОННЫЙ РЕГУЛЯТОР НАПРЯЖЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА
Выполнил:
студент группы УИТ -41
Баусов Р.Ю.
Проверила:
Мартынова И.В.
Балаково 2005.
ЭЛЕКТРОННЫЙ РЕГУЛЯТОР НАПРЯЖЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА
Электронный регулятор напряжения (ЭРН) предназначен для регулирования напряжения синхронных генераторов большой мощности в условиях изменяющейся электрической нагрузки.
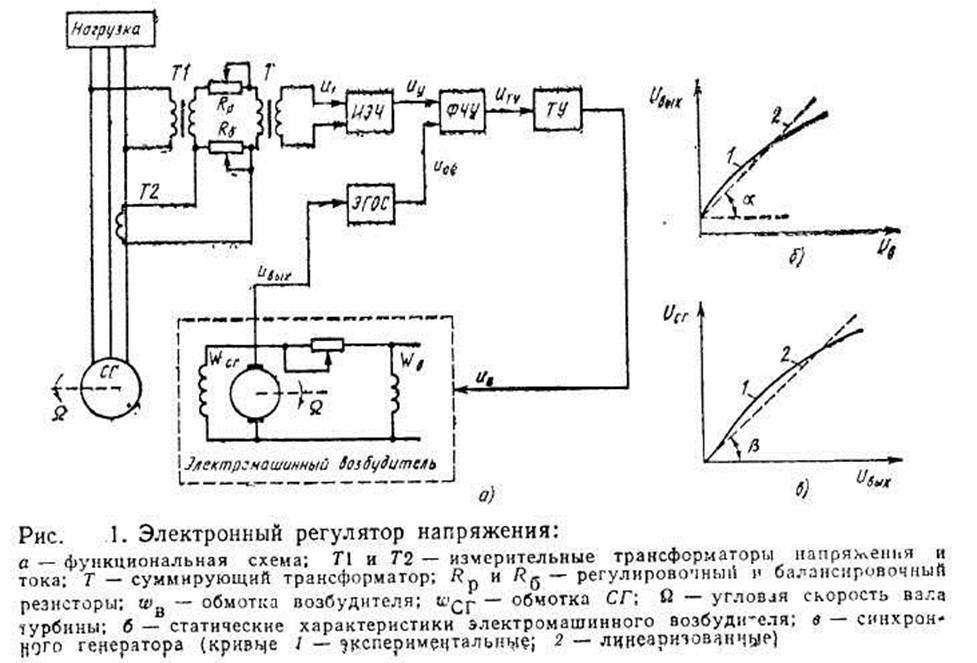
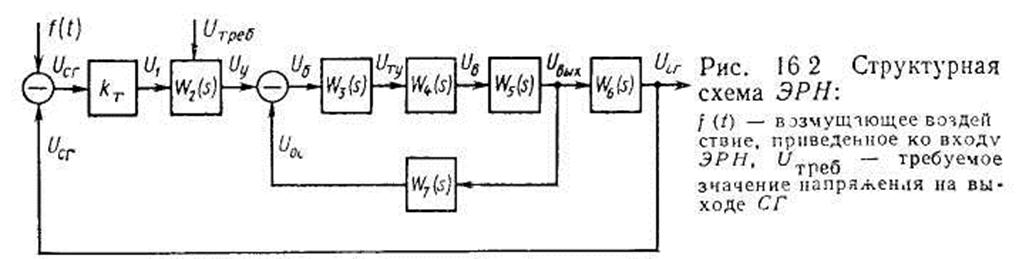
Функциональная схема ЭРН приведена на рис.1, она включает объект регулирования — синхронный генератор большой мощности (СГ), подключенный к нагрузке; измерительный элемент с RС-четырехполюсником (ИЭЧ), представляющий собой при номинальном напряжении Ucr уравновешенный мост; корректирующий элемент гибкой обратной связи (ЭГОС); фазочувствительный усилитель (ФЧУ), преобразующий сигнал разбаланса моста в соответствующий сдвиг фаз управляющего напряжения тиристоров тиристорного усилителя {ТУ). Электромашинный возбудитель СГ с обмоткой возбуждения служит исполнительным элементом регулятора.
Электронный регулятор напряжения является автоматической системой статического регулирования, т. е. при изменении нагрузки
на СГ для поддержания напряжения на номинальном уровне необходимо устанавливать различные токи возбуждения.
Принцип работы, уравнения и статические характеристики элементов ЭРН. Для получения требуемой характеристики компаундирования в ЭРН применяют трансформаторы тока и напряжения, которые формируют напряжение на входе ИЭЧ. Отклонение напряжения СГ от номинала вызывает изменение U1 на выходе суммирующего трансформатора, т. е.
![]()
где kт — коэффициент трансформации; Ucг — напряжение синхронного генератора.
Напряжение на выходе измерительного моста
![]()
где kим — передаточный коэффициент моста.
Сигнал uим(t) поступает на четырехполюсник, состоящий из резистора R и емкости С. Дифференциальное уравнение четырехполюсника

где Uy(t) — напряжение, поступающее на вход ФЧУ; Тч = RC — постоянная времени четырехполюсника.
Напряжение на базе входного транзистора ФЧУ равно разности напряжений:
![]()
где uос(t) — сигнал обратной связи элемента гибкой ОС.
Напряжение на выходе ФЧУ (на входе тиристорного усилителя)
![]()
Из рассмотренных выше уравнений получим следующие передаточные функции:
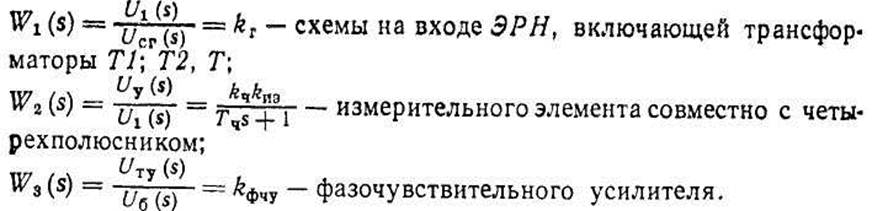
Передаточная функция ТУ регулятора

где uв(t) — напряжение на входе возбудителя; kту— коэффициент передачи ТУ.
С
выхода оконечного каскада усилителя напряжение поступает на обмотку ![]() возбудителя, затем на якорь
генератора постоянного тока и обмотку возбуждения синхронного генератора
возбудителя, затем на якорь
генератора постоянного тока и обмотку возбуждения синхронного генератора ![]() . Дифференциальное уравнение обмотки
. Дифференциальное уравнение обмотки
![]() возбудителя и якоря генератора,
питающего обмотку возбуждения СГ, имеет вид
возбудителя и якоря генератора,
питающего обмотку возбуждения СГ, имеет вид

где uвых(t) — напряжение на выходе электромашинного возбудителя; Тв — постоянная времени обмотки возбуждения генератора постоянного тока; Тг — постоянная времени обмотки возбуждения СГ; кв — передаточный коэффициент возбудителя.
Дифференциальное уравнение синхронного генератора

где kсг— передаточный коэффициент СГ; Тсг—
постоянная времени. Экспериментальные статические характеристики электромашинного
возбудителя и СГ приведены. Соответствующие коэффициенты передачи определяют по
линеаризованным характеристикам. kв = tg![]() ; kсг = tg
; kсг = tg ![]() .
.
Дифференциальное уравнение корректирующего элемента — гибкой ОС
где kгос — коэффициент гибкой обратной связи; ic(t) — ток корректирующего элемента.
В соответствии с уравнениями получим передаточные функции:

электромашинного возбудителя

— объекта регулирования — синхронного генератора;

— элемента гибкой ОС (здесь Тос — постоянная времени).
Структурная схема ЭРН, составленная в соответствии с передаточными функциями W1(s) —W7 (s) и уравнением сравнивающего элемента фазочувствительного транзисторного усилителя:
![]()
Передаточная функция системы с разомкнутой главной ОС

Используя выражение и выражения передаточных функций элементов, получим Ф(s) — передаточную функцию электронного регулятора напряжения как замкнутой САР:

если s![]() 0, то получим статический коэффициент
ЭРН
0, то получим статический коэффициент
ЭРН
![]()
где К=кткчкиэкфчуктуквксг, который характеризует статизм регулирования напряжения.
Анализ устойчивости процесса регулирования напряжения СГ, а также анализ качества поддержания напряжения относительно номинального значения можно выполнить в соответствии с данными выражениями.
Величина статизма регулирования в системе может изменяться с помощью схемы токовой стабилизации, состоящей из резисторов, включенных в цепь трансформатора тока. Таким образом обеспечивается устойчивое распределение реактивной нагрузки между параллельно работающими генераторами.
Для синхронных генераторов, работающих на дальние линии электропередачи, закон регулирования усложняется за счет введения воздействия по отклонению напряжения и его производных по времени, а также по току статора и его производным.
Проверим систему на устойчивость, по критерию устойчивости Ляпунова.
Найдем полюса (корни
характеристического уравнения) передаточной функции ![]() для
замкнутой системы:
для
замкнутой системы:

Полюс имеет отрицательную вещественную часть, следовательно, система устойчива.
Построим переходный процесс и определим прямые оценки качества системы.
1. Время переходного процесса системы – это время регулирования системы, определяется как интервал времени от момента приложения какого-либо воздействия на систему до времени вхождения системы в 5% трубку. tn = 7 51с
2. Перерегулирование (максимальная динамическая ошибка)
![]()
3. Колебательность – число колебаний системы от момента воздействия на нее до перехода в установившееся состояние. N=0
4. Время нарастания регулируемой величины – время, при котором выходная величина достигает своего максимального значения. tm=7.27с.
5. Время первого согласования – время, за которое регулируемая величина первый раз достигнет своего установившегося значения. t1 = 0.098c.
Построим АЧХ замкнутой системы и определим косвенные оценки качества системы.
|
|
|
|
|
|
|
|
|
|
|
|
|
|

1.
Показатель
колебательности: 
2. Резонансная частота – частота, при которой амплитуда достигает значения максимума: wр=0
3. Частота среза определяется как частота, при которой АЧХ принимает значение A=1, в данной системе отсутствует.
4.
Полоса
пропускания частот – интервал частот, когда значения АЧХ не менее, чем  откладываем ее на АЧХ и
в точках пересечения с графиком получаем частоты определяющие полосу
пропускания (=1.202E-3): (w1, w2) = (0; 0.05).
откладываем ее на АЧХ и
в точках пересечения с графиком получаем частоты определяющие полосу
пропускания (=1.202E-3): (w1, w2) = (0; 0.05).
Построение ЛАЧХ И ЛФЧХ и определение запасов устойчивости
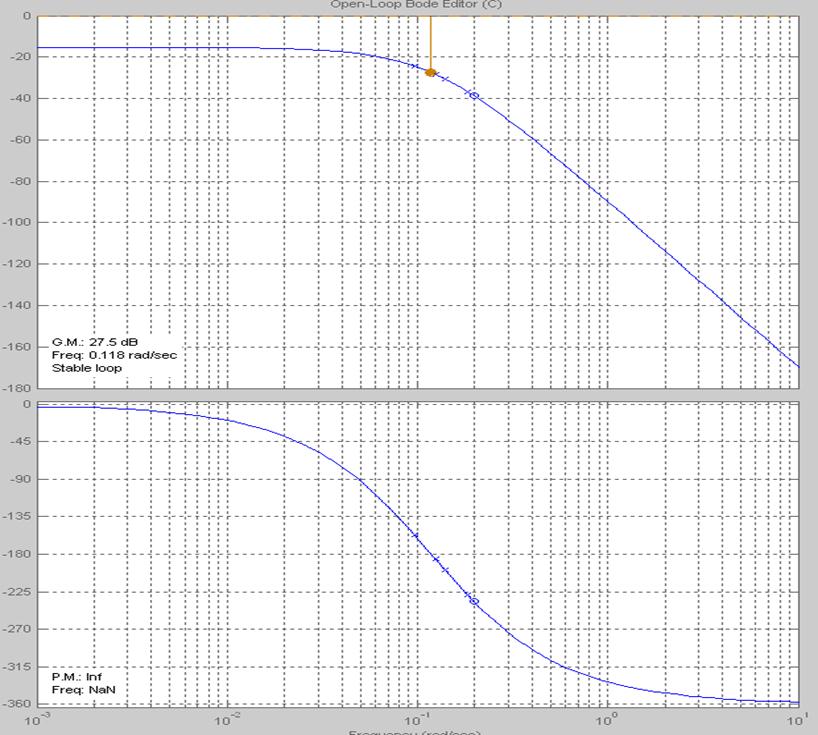
Определяем
запас по амплитуде. Из точки![]() проводим прямую вертикально вверх до
пересечения с ЛАЧХ находим точку пересечения. Следовательно запас устойчивости
по амплитуде будет равен А=-27.5Дб и определяется при частоте 0.118 рад/сек.
проводим прямую вертикально вверх до
пересечения с ЛАЧХ находим точку пересечения. Следовательно запас устойчивости
по амплитуде будет равен А=-27.5Дб и определяется при частоте 0.118 рад/сек.
Запас устойчивости по фазе отсутствует т.к коэффициент усиления мал.
ВЫВОД: Анализ линейной части системы показывает, что данная ЛАХ отрицательна (т.е. расположена ниже оси абсцисс), следовательно данная САУ устойчива.

Нелинейный элемент представляет собой чувствительный элемент с идеальной статической характеристикой с зоной насыщения.
Размыкаем структурную схему перед нелинейным элементом, получим:

Затем преобразуем линейную часть системы:

Разделим числитель и знаменатель на выражение (p+0.3):
Так как наглядное представление фазовых траекторий возможно только для систем, порядок которых не выше второго, то передаточная функция будет иметь вид:

Сделаем замену:
Линейная часть системы будет описываться следующим дифференциальным уравнением:
Уравнение нелинейного элемента
![]()
Уравнение сравнивающего элемента
![]()
Предположим, что задающее воздействие x(t)=0. Тогда уравнение нелинейной системы будет иметь следующий вид

Характеристика нелинейного элемента разбивается на три линейных участка и для каждого из них составляется линейное дифференциальное уравнение
![]()
Сделаем замену:
![]()
Разделим правые и левые части этих уравнений на 1,6:
Определим функцию D по 3-м линейным участкам нелинейной статической характеристики, задающую производную, приведя дифференциальное уравнение 2-го порядка к системе 2-х дифференциальных уравнений 1-го порядка
Зададим начальное значение для вектора s:

Найдем матрицу решения
![]()
Построим траекторию на фазовой плоскости, предполагая, что первый столбец матрицы решения Si,0 содержит точки, в которых ищется решение дифференциального уравнения, второй Si,1 – содержит значения найденного решения (первая производная), и, наконец, третий столбец Si,2 содержит вторые производные этого решения.
![]()
![]()
![]()
![]()
По полученному фазовому портрету построим график переходной функции.
Фазовая траектория стремится к нулевому значению, что говорит об устойчивости системы. Вид фазовой траектории показывает, что качество управления удовлетворительное. Улучшения качества можно добиться путем замены элементов системы, или изменением параметров уже имеющихся элементов.
На фазовой плоскости изображена фазовая траектория для комплексных корней с отрицательными вещественными частями, следовательно получена особая точка «устойчивый фокус». А из графика переходной функции видно, что система устойчива.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.