Низкие частоты: ![]()
![]() , интегратор уменьшает коэффициент
передачи.
, интегратор уменьшает коэффициент
передачи.
Принцип работы: Если изменение параметров объекта приближает систему к границе устойчивости, то возрастает колебательность в системе и в сигнале ошибки начинает преобладать высокочастотная составляющая. В результате выходной сигнал высокочастотного фильтра превышает сигнал низкочастотного. Разность этих сигналов со знаком минус поступает на вход интегратора и вызывает понижение коэффициента регулятора, при этом система удаляется от границы устойчивости.
Если при изменении параметров объекта система
удаляется далеко от границы устойчивости, то процессы в ней становятся очень
медленными, при этом начинает преобладать низкочастотная составляющая ошибки
системы. Разностный сигнал ![]() в этом случае
оказался положительным и увеличивает коэффициент
в этом случае
оказался положительным и увеличивает коэффициент ![]() .
.
При некотором значении коэффициента передачи
системы высокочастотная и низкочастотная составляющая сигнала становятся
равными и сигнал ![]() , таким образом при этом в
основном контуре поддерживается определенный желаемый запас устойчивости.
, таким образом при этом в
основном контуре поддерживается определенный желаемый запас устойчивости.
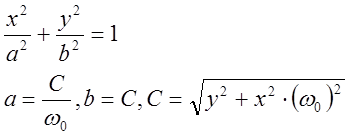
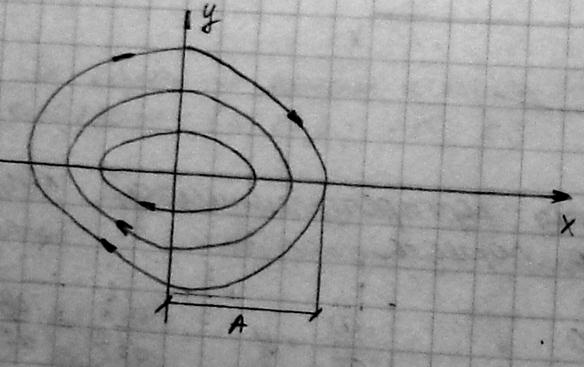
4.1. Фазовый потрет линейной консервативной системы

Избавимся от времени

Уравнение эллипса:

4.2. Адаптивные системы с эталонной моделью
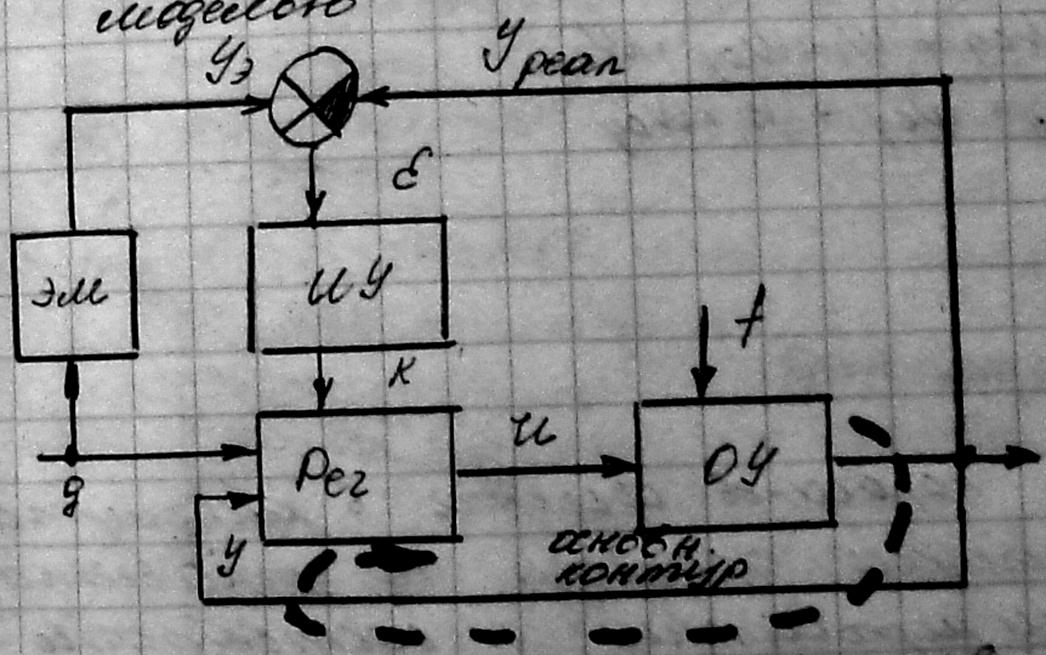
К классу адаптивных систем прямого действия относятся адаптивные системы с эталонной моделью
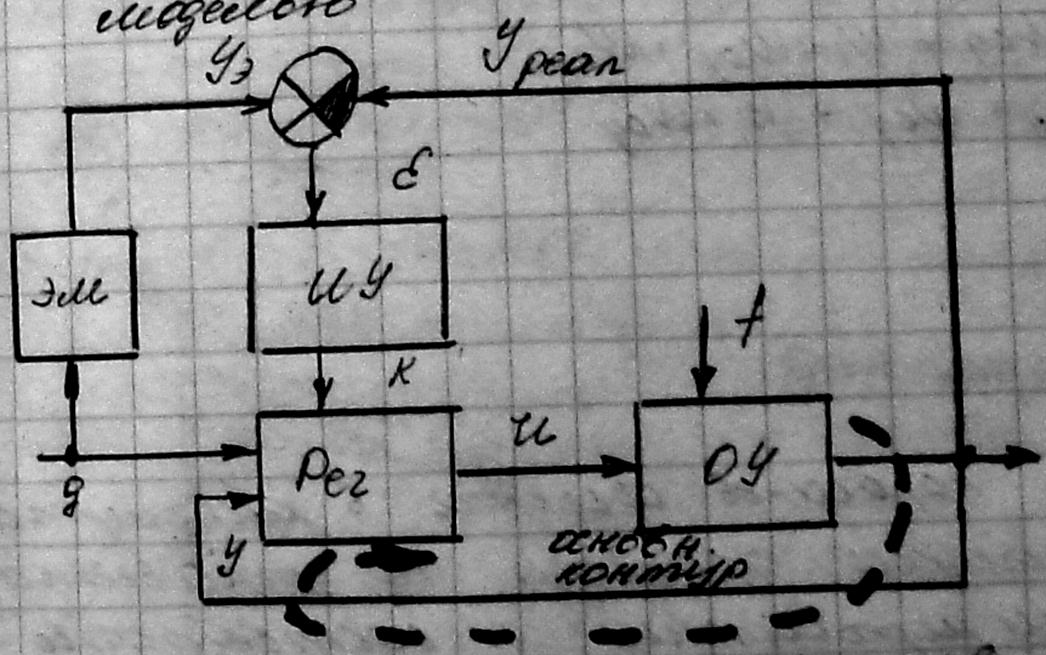
ЭМ – эталонная модель
![]()
Задача адаптивных систем ![]()
Эталонная модель по своим динамическим характеристикам является эталоном для основного контура системы.
Цель самонастройки системы: сведение к нулю ошибки адаптации.
Главное достоинство адаптивных систем с эталонной моделью:
1. простота реализации
2. быстрота действия
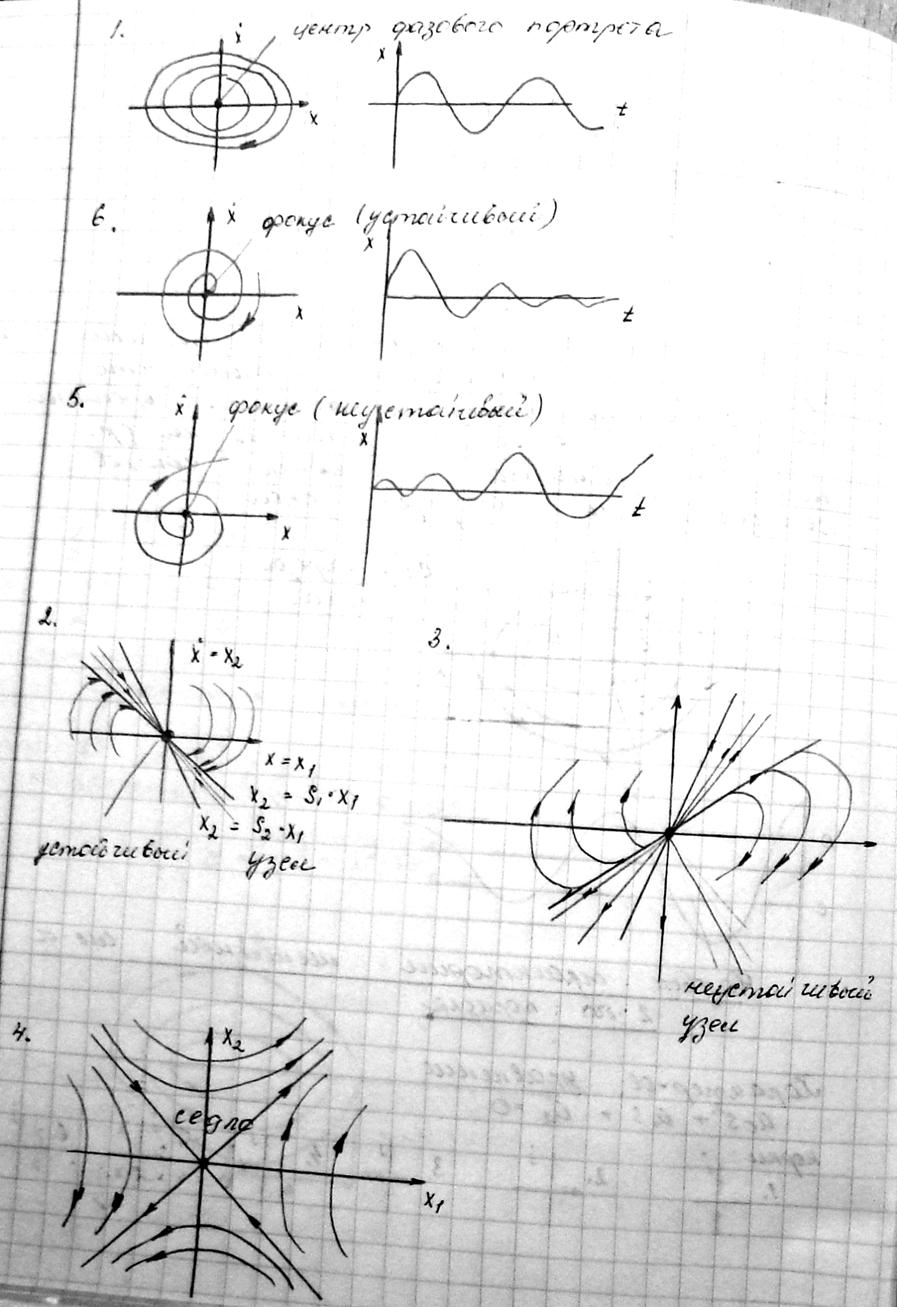
5.1. Особые точки фазовых портретов линейной системы второго порядка
Характеристическое уравнение ![]()

5.2. Принципы построения контура адаптации
Два принципа:
1) Идентификационный
2) Безидентификационный
Два типа адаптивных систем:
1) Адаптивная система с идентификатором
2) Адаптивная система прямого действия
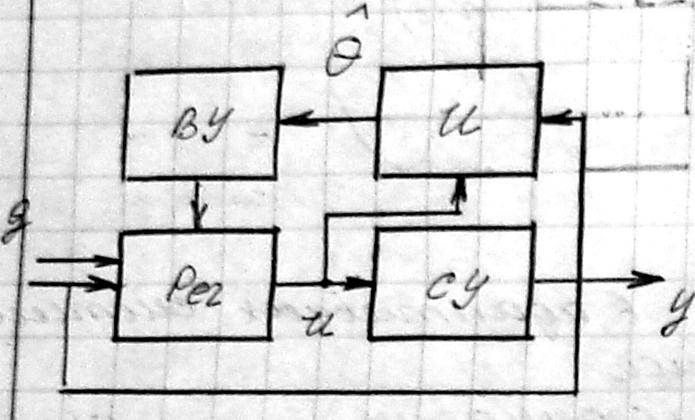
Адаптивные системы с идентификатором:
Идентификация объекта управления – построение его математической модели по наблюдаемым входным и выходным сигналам
Идентификатор – устройство, определяющее по входным и выходным сигналам модель объекта управления
![]() -
вектор изменяющихся параметров объекта управления
-
вектор изменяющихся параметров объекта управления
![]() - оценка
(векторов) парметров
- оценка
(векторов) парметров
ВУ – вычислительное устройство
![]() -
настройка регулятора
-
настройка регулятора
![]() -
идентификатор
-
идентификатор
![]() - внешнее
возмущение
- внешнее
возмущение
Контур адаптации включает два блока: И и ВУ.
И – определяет текущие оценки параметров объекта управления
ВУ – по этим оценкам рассчитывает необходимые настройки ![]() регулятора, при которых
обеспечивается требуемое качество работы основного контура системы
регулятора, при которых
обеспечивается требуемое качество работы основного контура системы
Трудности использования принципа идентификации:
1. Требуется значительное время для расчета оценок изменяющихся параметров объекта управления
2. сложность алгоритма работы в режиме реального времени
Адаптивные системы прямого действия (без идентификатора):

Изм. У. – измерительное устройство
ИУ – исполнительное устройство
Z – критерий качества
К классу адаптивных систем прямого действия относятся адаптивные системы с эталонной моделью
ЭМ – эталонная модель
![]()
Задача адаптивных систем ![]()
Эталонная модель по своим динамическим характеристикам является эталоном для основного контура системы.
Цель самонастройки системы: сведение к нулю ошибки адаптации.
Главное достоинство адаптивных систем с эталонной моделью:
3. простота реализации
4. быстрота действия
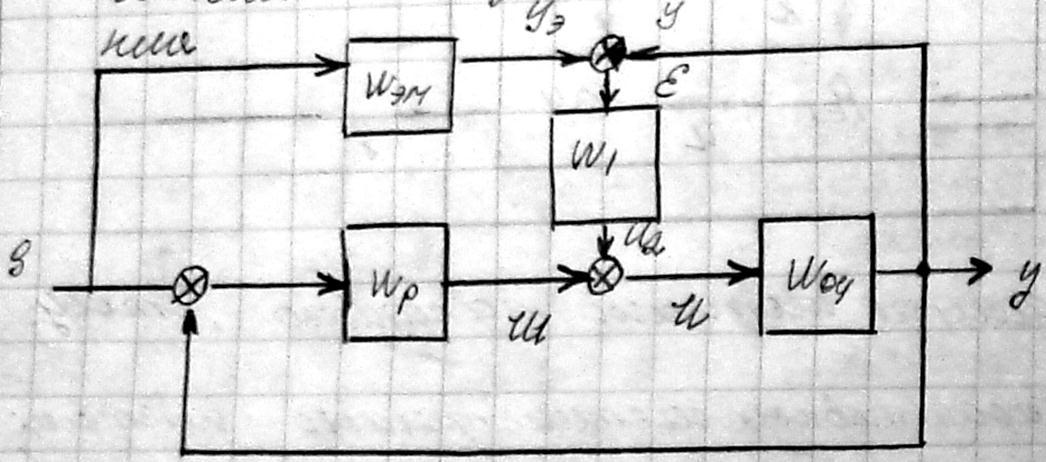
Рассмотрим адаптивную систему с эталонной моделью и параметрической самонастройкой.
Самонастройка системы без изменения параметров регулятора –сигнальная самонастройка. Она заключается в формировании специального добавочного сигнала и подачи его на вход объекта управления.
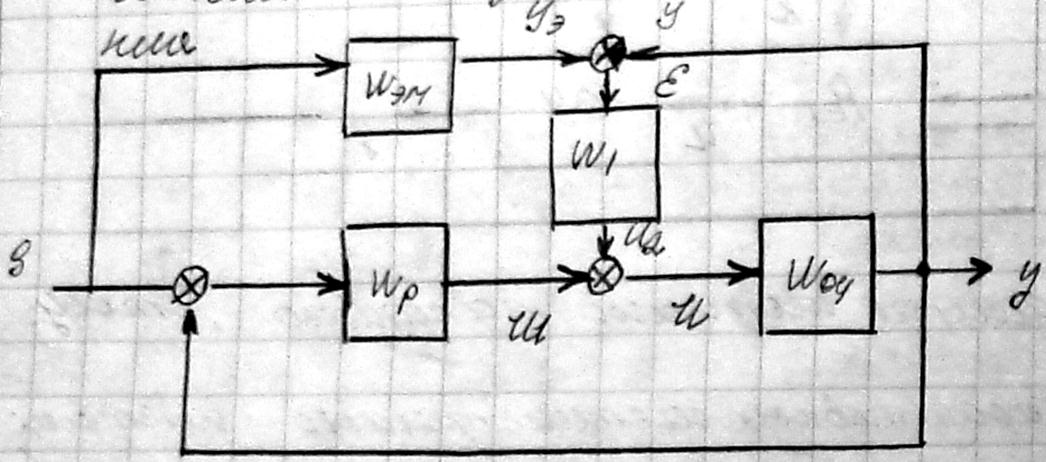

Пусть ![]()
![]()
При изменении параметров объекта в замкнутой системе динамические процессы по управлению будут стабилизированы и соответствовать эталонной системе
Достоинства: простота реализации контура адаптации, так как нет необходимости формировать алгоритмы настройки параметров регулятора
Недостаток: возможность потери устойчивости системы вследствие
очень большого коэффициента усиления![]()
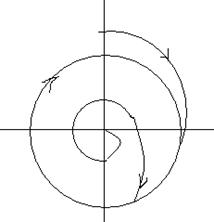
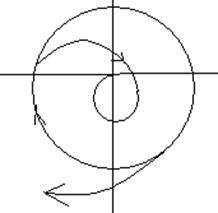
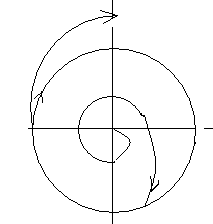
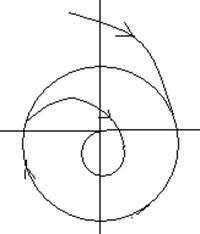
6.1. Особые линии фазовых портретов нелинейных систем
Фазовые портреты (ФП) имеют особые линии - замкнутые фазовые траектории(ФТ). Такие линии отражают периодическое движение в системе и называются предельными циклами.
Различают: (круг – предельный цикл)
|
1. Устойчивые ПЦ |
2. Неустойчивый ПЦ |
3. Полуустойчивые ПЦ |
|
|
|
|
Устойчивый ПЦ соответствует автоколебаниям в САУ (незатухающим периодическим колебания)
Сепаратриссы - линии, разделяющие фазовую плоскость на подобласти с различным характером движения системы
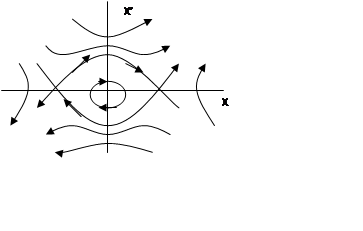 Движение не по сепаратриссам , а
вокруг них.
Движение не по сепаратриссам , а
вокруг них.
Зоны застоя – они характеризуют возможный диапазон, куда попадает координата системы в установившемся режиме.
Такие зоны застоя имеются у систем с
нечувствительностью и сухим трением
и сухим трением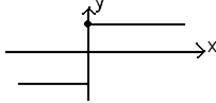 .
.
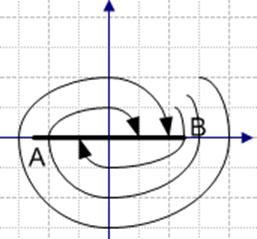 АВ - зона застоя.
АВ - зона застоя.
6.2. Адаптивные системы с сигнальной самонастройкой
Рассмотрим адаптивную систему с эталонной моделью и параметрической самонастройкой.
Самонастройка системы без изменения параметров регулятора –сигнальная самонастройка. Она заключается в формировании специального добавочного сигнала и подачи его на вход объекта управления.
Пусть ![]()
![]()
При изменении параметров объекта в замкнутой системе динамические процессы по управлению будут стабилизированы и соответствовать эталонной системе
Достоинства: простота реализации контура адаптации, так как нет необходимости формировать алгоритмы настройки параметров регулятора
Недостаток: возможность потери устойчивости системы вследствие
очень большого коэффициента усиления![]()
7.1. Основные положения метода гармонической линеаризации
В основе метода гармонической линеаризации систем – линеаризация нелинейных элементов, входящих в систему управления.
Метод применяется для анализа колебательных переходных процессов, когда на входе нелинейного элемента присутствует гармонический сигнал.
При гармонической линеаризации система управления приводится к следующему виду:
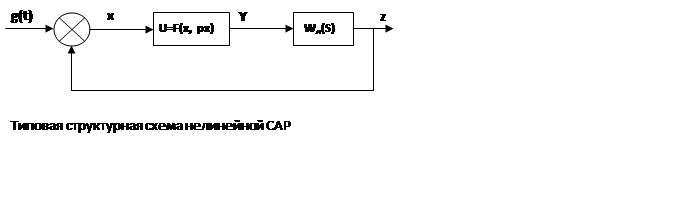
Допущения:
1. Линейная часть должна быть фильтром низких частот (то есть должна пропускать только низкие частоты)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.