|
В первом случае применительно к ЛДПТ используются уравнения для средних выпрямленных напряжений и токов в виде
коэффициент
kинв - коэффициент инвертирования, зависящий от угла коммутации; N-число проводников в якорной обмотке, R,- активное сопротивление якорной обмотки. Имея в виду, что во внекоммутационные интервалы ток протекает последовательно по двум фазам двигателя и падение напряжения составляет 2VaId, а во время коммутации две фазы соединены параллельно и падение напряжения равняется 1,5Idra, полагают Ra≈1,85ra, при обычном угле коммутации γ = 15-20°. Скорость перемещения Сила тяги
Рисунок 28 При анализе характеристик вентильного ЛДПТ с позиций синхронной машины базируются на векторную диаграмму, приведенную на рисунке 28, поскольку поле в зазоре его является практически синусоидальным. Сопротивление коммутации xk, указанное на этом рисунке, обуславливается пульсирующим полем от тока коммутации ikи приближенно определяется по формуле
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.214346.001 |
Лист |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
21 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм. |
Лист |
№ докум. |
Подп. |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
7 Примеры двигателей 1 Без стального сердечника: серия GW с двухсторонней магнитной тягой между катушкой и платформой 2 Со стальным сердечником: серия FW с односторонней магнитной тягой между катушкой и платформой, серия TW с двухсторонней магнитной тягой. Таблица 5 – Серии двигателей
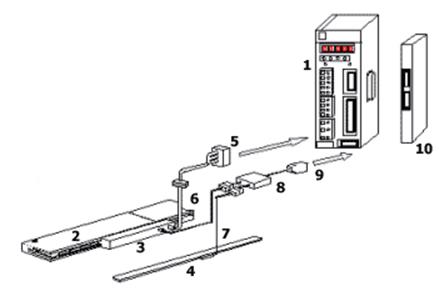
Рисунок 29 Комплектация системы (рисунок 30): 1 Стандартный преобразователь Sigma II или XtraDrive 2 Магнитная платформа 3 Катушка 4 Линейный энкодер (пр-во Renishaw, Heidenhain) 5 Силовой кабель 6 Кабель датчика катушки 7 Кабель датчика линейного энкодера 8 Конвертер 9 Кабель конветера 10 Опционная карта (сетевая)
Рисунок 30 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.214346.001 |
Лист |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
22 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм. |
Лист |
№ докум. |
Подп. |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Преимущества использования линейных двигателей перед стандартными решениями с механическими передачами: 1 Сокращение числа сложных и изнашиваемых механических узлов системы; 2 Повышение надёжности и долговечности системы; 3 Сокращение времени и затрат на проектирование и сборку технологического агрегата; 4 Высокая точность (0,1мкм); 5 Повышение производительности за счёт возможности предъявления к системе более высоких требований, а так же за счёт более длительного моторесурса самих двигателей и сопрягаемых узлов (серии GW и TW, запатентованные Yaskawa, минимально подвержены износу благодаря особенностям конструкции) 6 Низкая шумность; 7 Компактность. Таблица 6 – Характеристики линейных двигателей
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.214346.001 |
Лист |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
23 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм. |
Лист |
№ докум. |
Подп. |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Продолжение таблицы 6 – Характеристики линейных двигателей
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.214346.001 |
Лист |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
24 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм. |
Лист |
№ докум. |
Подп. |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Литература 1 Бочаров В. И. и др. Высокоскоростной наземный транспорт с линейным приводом и магнитным подвесом.-М.:Транспорт,1985.-278 с. 2 Бочаров В. И. и др. Транспорт с магнитным подвесом.-М..:Машиностроение,1991.-314с. 3 Бочаров В. И. и др. Основы проектирования электроподвижного состава с магнитным подвесом и линейным тяговым электроприводом.-Ростов-на-Дону,1992.,ч.1,430с.,ч.2,294с. 4 Веселовсжий О. Н. и др. Линейные асинхронные двигатели.-М.:Энергоатомиздат,1991.-255с. 5 Винокуров В. А. Проблема создания наземных электролетов и пути ее решения.-М.:Труды ВВИА им. проф. Н. Б. Жуковского,1991 г. 6 Винокуров В. А и др. Эффективные тягоподьемные модули ВСНТ с магнитным подвесом. Международный электротехнический конгресс,Суздаль,1994. 7 Винокуров В. А., Салям Али. Оценка тягово-энергетических показателен модульных линейных асинхронных двигателей и перспективы их улучшения.. Международные научно-практический семинар по электромеханике, Суздаль,1991. 8 Винокуров В. А.. Высокоскоростной наземный транспорт.-М.:Труды МГУ ПС, 1995. 9 Винокуров В. А., Попов Д. А. Электрические машины железнодорожного транспорта.-М.:Транспорт,1986.-511с. 10 Вольдек А. И. Индукционные магннтогндродинамнческие машины с жидкометаллическим рабочим телом.-Л.:Энергия,1970.-270с. 12 Насар С. А., Болдеа И. Линейные тяговые электромашины.-М..:Транспорт,1981.-176с. 13 Омельяненко В.И. Линейные двигатели постоянного тока с тиристорным коммутатором.-Харьков:Основа,1994.-183с. 14 Штурман Г. И. Индукционные машины с разомкнутым магнитопроводом.- М.:Электричество,1946.-10с. 15 Ямамура С. Теория линейных асинхронных двигателей.-Л.:Энергияатомиздат,1983.-180с. 16 Якимец И. В., Винокуров В А., Наровлянский В. Г. Магнитный подвес на основе высокотемпературных сверхпроводников для транспортных систем.-Электричество,1996.5. 17 Сверхпроводящие машины и устройства.-М.:Мир,1977.-163с. 18 Новые концепции магнитного подвеса в США.-Железные дороги мира,1993.12. 19 Расчет и проектирование транспортных линейных асинхронных двигателей.-МГУПС,1997.-52с. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.214346.001 |
Лист |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
25 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм. |
Лист |
№ докум. |
Подп. |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 ;
; .
.
 , где
, где