|
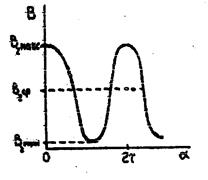
Рисунок 21 Рисунок 22 Расчётная схема магнитной цепи ЛИД изображена на рис. 2,37. Для других значений q схема замещений строятся аналогично. На рисунке 22 обозначено Fd-мдс возбуждения на четверти длинны магнитопровода ; Fni -мде пазов в якоре; Фzi-магнитный поток i-ro зубца якоря; Xбв-проводимоеть потока рассеиния обмотки возбуждения; λn -проводимость потока пазового рассеивания; λδi-проводимость воздушного зазора i-го зубца. Величина
Хв -принимается обычно не зависящей от насыщения соседних зубцов и определяется по формуле: Значение магнитных напряжений Fzi и коронок зубцов Fδi определяется в результате расчета нелинейной магнитной цепи итерационным методом пока Fni и FBне достигнут заданных значений Поскольку в якорной зоне помимо переменной составляющей индукции присутствует и средняя составляющая индукции, то при конструировании ЛИД приходится допускать повышенное насыщение зубцов якоря. С другой стороны, так как работа ЛИД зависит от эффектов переменного магнитного сопротивления, то нельзя допускать насыщения явнополюсной конструкции. Зная картину токораспределения можно определить Э.Д.С., наводимую в катушках якорной обмотки по соотношению
Расчет тягового
усилия производится в соответст
где Вδi- усредненное по зубцовому делению значение индукции в зазоре на участке Iгопаза. Величина Вδi вычисляется через потоки зубцов
Иначе тяговое усилие может быть определено по формуле
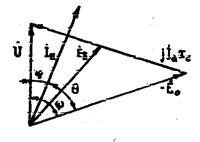
Ai - то же линейной нагрузки индуктора; Ψi - фазовый угол между ними, равный углу между Ia и -Eδ на векторной диаграмме (рисунок 23). |
||||||
|
КСУИ.214346.001 |
Лист |
|||||
|
18 |
||||||
|
Изм. |
Лист |
№ докум. |
Подп. |
Дата |
||
|
Рисунок 23 Для симметричной многофазной обмотки индуктора
k0δ1 – обмоточный коэффициент; A – эффективная линейная нагрузка обмотки индуктора. После подстановки A в исходное уравнение, получаем
Иногда
Bδ1
выражают через коэффициент пульсации магнитной индукции ЛИД имеют достаточно высокие энергетические показатели.
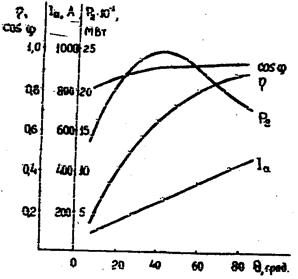
Рисунок 24 На рисунке 24 в качестве примера приведены характеристики ДЛИД - 2000. По массогабаритным показателям, однако, они уступают не только ЛСД описанных выше конструкций, но и ЛАД из-за плохого использования магнитного потока и увеличенного сечения магнитопровода, вследствие наличия постоянной составляющей магнитного потока возбуждения. По тем же причинам ЛИД имеют относительно худшими и пусковые характеристики из-за повышенных значений индуктивных сопротивлений якорных обмоток. 6 Линейные двигатели постоянного тока Линейные двигатели постоянного тока {ЛДПТ) предназначаются для работы яри относительно низких скоростях движения. Принцип действия простейших ЛДПТ легко понять если представить себе машину постоянного тока развернутую в плоскость со щетками, перемешающимися непосредственно по проводникам якорной обмотки (рисунок 25). При этом рабочими являются лишь секции находящимися непосредственно под полюсами. Включение секций обмотки якоря осуществляется с помощью датчиков положения индуктора, которые могут быть контактного тина, либо бесконтактными (на герконах, фотоэлементах и пр.). |
||||||
|
КСУИ.214346.001 |
Лист |
|||||
|
19 |
||||||
|
Изм. |
Лист |
№ докум. |
Подп. |
Дата |
||
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 , где
hn, Bn - соответственно высота и ширина
паза якоря. Магнитный поток i-ro зубца на единицу длины якоря Iδ:
, где
hn, Bn - соответственно высота и ширина
паза якоря. Магнитный поток i-ro зубца на единицу длины якоря Iδ:  , где wt- число витков в пазу.
, где wt- число витков в пазу. ,
, , где t - зубцовое деление якоря.
, где t - зубцовое деление якоря. , где Bδi, - амплитуда первой гармоники поля возбуждения в
воздушном зазоре;
, где Bδi, - амплитуда первой гармоники поля возбуждения в
воздушном зазоре;
 , где wa – число витков фазы;
, где wa – число витков фазы; ,
, .
.