Чувствительность индуктивного датчика скорости потока относительно невелика. Например, при скорости потока 1 м/сек в трубке диаметром 5 см, находящейся в сильном магнитном поле с индукцией 0,1 Тл, появляется выходное напряжение величиной всего лишь 5 мВ. В принципе, датчик линеен, но из-за изменения скорости потока вдоль поперечного сечения трубы, вызванной вязкостью жидкости, это не всегда имеет место. Можно показать, что выходное напряжение V линейно связано со средней по поперечному сечению скоростью потока: va=Q/πr2, где Q — общий объем жидкости, протекающей через поперечное сечение площадью πr2 за секунду.
Датчики ускорения
Преобразователи для измерения ускорения основаны на измерении силы F, необходимой для придания известной массе (подвижной массе m) такого же ускорения (а), какое имеет измеряемый объект Зная значения силы и массы, определяем ускорение: а = F/т Однако присоединение этой массы (и дополнительной массы корпуса датчика) к измеряемому объекту может повлиять на величину измеряемого ускорения. Поэтому дополнительная масса должна быть сведена к минимуму, особенно когда объект измерения очень упругий или имеет малую массу. Мы не будем отдельно касаться датчиков ускорения, поскольку необходимые методы и принципы преобразования будут рассмотрены в следующем разделе, посвященном датчикам усилий
Датчики усилий
 |
Здесь ![]() — давление на стержень, F- сила,
действующая на стержень, А- площадь поперечного сечения стержня и
— давление на стержень, F- сила,
действующая на стержень, А- площадь поперечного сечения стержня и ![]() х / х- относительное удлинение
х / х- относительное удлинение
3.2Входныепреобразователи
|
|
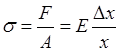
Е — относительное удлинение (или деформация) стержня. На рис. 3.12(b) и (с) показаны действующие по этому принципу, так называемые манометры Бурдона (Bourdon). Величина смещения х или угол поворота θ в этих манометрах обычно измеряются посредством тензорезисторов или дифференциальных трансформаторов смещения.
Рис. 3.12. Несколько различных упругих пружинных конструкций для преобразования силы F или давления Р в линейное смещение х или угол поворота q;(а) пружина кольцевого типа; (b) винтовая пружина Бурдона; (с) спиральная пружина Бурдона; (d) мембранная пружина.
Пьезоэлектрические датчики силы
У некоторых материалов наблюдается эффект электрической поляризации, изменяющейся при любой механической деформации материала. Когда к небольшому образцу такого материала приложена сила (или на него оказывается давление), между противоположными гранями образца возникает разность электрических зарядов. Это явление называется пьезоэлектрическим эффектом (от греч..piezein — нажать).
Этот эффект наблюдается у материалов, в кристаллической решетке которых отсутствует центр симметрии, например у кварца. Любая внешняя механическая деформация вызывает изменение дипольного момента кристалла. В асимметричном кристалле это изменение различно по разным направлениям, что является причиной макроскопической электрической поляризации, приводящей в результате к возникновению разности зарядов на гранях кристалла. Этот эффект может также наблюдаться в материалах, обладающих центром симметрии, если только симметрия нарушена сильным электрическим полем из-за спонтанной поляризации материала. Примером такого класса материалов (так называемых ферроэлектриков) является ти-танат бария.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.