Необходимо отметить, что обычно код, используемый в оптическом преобразователе — не простой двоичный код, как показано на рис. 3.10(а). Основной недостаток простого двоичного кода состоит в том, что даже при совсем небольшом смещении могут измениться сразу несколько битов. Из-за конечной разрешающей способности системы оптического обнаружения, может возникнуть ситуация, при которой только часть (но еще не все) биты изменились. Это (переходное) состояние может соответствовать совершенно другому положению кодирующей ленты. Поэтому обычно выбирается код, в котором одновременно изменяется не более одного бита, например, код Грея.
Датчики смещения, в которых применяются поворотный или ленточный кодеры, имеют фиксированное положение нуля. Поэтому они относятся к абсолютным датчикам смещения. Особенно удобны эти датчики для подключения к компьютеру для цифрового управления перемещением.
В качестве альтернативы методу кодирования абсолютного положения по отношению к ленте можно использовать также единственную дорожку чередующихся прозрачных и непрозрачных полос. Тогда изменение положения можно определить подсчитывая число импульсов света. Этот метод не имеет фиксированного положения нуля и поэтому измеряет приращение смещения. В основе измерения лежит измерение интервала. Здесь разрешающая способность определяется наименьшим различимым расстоянием между двумя смежными линиями решетки Это расстояние ограничено световым датчиком и составляет обычно только 1 мм. Если желательно более высокое разрешение, можно воспользоваться муаровым изображением, как это показано на рис. З.10(Ь). Дополнительная решетка помещается перед основной измерительной решеткой под небольшим углом, что создает картину светлых и темных полос, передвигающихся вертикально, когда измерительная решет-
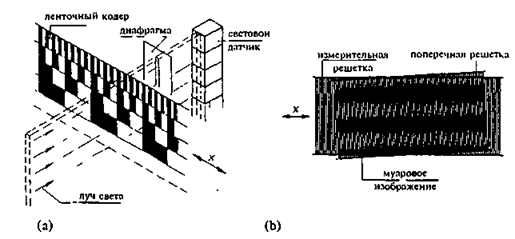
Рис 310 (а) Оптический датчик смешения с кодирующей лентой (Ь) Увеличение расстояния между линиями решетки с использованием муарового изображения
3.2 Входные преобразователи
ка перемещается горизонтально. Когда решетка перемещается на расстояние, равное расстоянию между двумя линиями решетки, лучи будут перемещаться на расстояние, точно равное их собственной ширине. Расстояние между лучами и ширина лучей определяются углом между передней решеткой и измерительной решеткой. Когда датчик света помещается позади этой конструкции, создается впечатление, будто расстояние между линиями решетки увеличилось.
При использовании такого метода можно получить увеличение чувствительности к смещению в 103 раз. Разрешающая способность составляет величину порядка 1 мкм. При использовании призм и других оптических средств эту величину можно увеличить еще больше.
Датчики скорости
При рассмотрении датчиков для измерения скорости необходимо различать датчики линейной скорости и датчики угловой скорости. Если угловая скорость почти постоянна, мы говорим также об измерении числа оборотов в минуту, об/мин. В следующем разделе мы обсудим несколько методов и принципов, часто используемых для преобразования информации о скорости в электрический сигнал.
Преобразование скорость-частота
Измерение скорости часто сводят к измерению частоты, поскольку частоту электрического сигнала можно измерить очень точно. Преобразование выполняется с помощью диска или ленты с большим числом меток (обнаруживаемых элементов), помещенных на равных расстояниях Δх. Скорость может быть найдена из соотношения v = Δxn/t = Δxf, где п — число меток, обнаруженных за t секунд, а f — частота выходного сигнала. Обнаружение меток можно выполнить оптическим, механическим, индуктивным или емкостным методом. Так как f= v/Δх, разрешающая способность при измерении скорости определяется скоростью v и расстоянием Δх. Разрешающая способность уменьшается с уменьшением скорости, и поэтому для измерения малых скоростей расстояние Δх должно быть очень малым.
Измерение скорости путем дифференцирования и интегрирования
Для линейной скорости v(t):
 |
где x(t) — линейное
смещение. Для угловой скорости ![]() (t):
(t):
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.