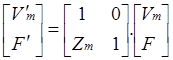
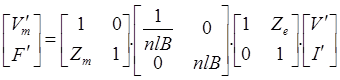
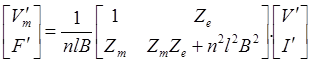
Следовательно, передаточные соотношения для преобразователя в целом принимают вид:
 |
 |
3.2.1 Электромеханические датчики
Теперь рассмотрим принцип работы нескольких датчиков, применяемых для измерения механических величин. Мы ограничимся самыми обычными величинами, такими как смещение, ускорение, сила и т. д.
Измерительные приборы в электрических измерениях
Датчики смещения
Датчики смещения могут измерять как линейный сдвиг (при поступательном движении), так и угол поворота (при вращении) Кроме того, их можно классифицировать в соответствии с используемым принципом преобразования Например, можно провести различие между резистивными, емкостными, индуктивными и оптическими датчиками поступательного движения или вращения Эти механические датчики называются также тензодатчиками или сенсорами
Резистивные датчики смещения
Распространенным типом датчика смещения является потенциометрический датчик. В случае измерения сдвига при поступательном движении он представляет собой, в действительности, не более чем движковый потенциометр. Для измерения угла поворота при вращении можно применить поворотный потенциометр Проволочные потенциометры обычно имеют большую точность, меньший температурный коэффициент и т д. Однако конечная разрешающая способность проволочных датчиков смещения ограничивает их возможности. Недостатком всех датчиков потенциометрического типа является механический износ и химическая коррозия, способные изменить передаточную характеристику датчика в течение его срока службы
В качестве примера датчика линейного смещения приведем in casu параметры проволочного движкового потенциометра, с 1000 витками провода из нихрома (NiCr)
длина — 25 см, полное сопротивление — 300 Ом, нелинейность — 10-3 максимальное разрешение — 103, температурный коэффициент — 2x104 К-1, сила трения - 0,5 Н
Легко видеть, что
потенциометрический датчик смещения становится нелинейным, когда он нагружен.
Относительная ошибка, появляющаяся при подключении нагрузки, равна нулю при x = 0
или x = 1. и максимальна при х = 0,5 (х — относительное положение
подвижного контакта (движка) на длине резистора, так что 0 ![]() ) Когда x = 0,5, относительная
ошибка равна — R/4R1
, где R — полное сопротивление потенциометра, a R1 — сопротивление нагрузки
) Когда x = 0,5, относительная
ошибка равна — R/4R1
, где R — полное сопротивление потенциометра, a R1 — сопротивление нагрузки
В другом типе резистивного датчика смещения используется тот факт, что электрическое сопротивление проводника зависит от размеров проводника Сопротивление R является функцией площади поперечного сечения А проводника, его длины l и удельного сопротивления p:
r = r(a,l,p)
Если проводник механически растягивается или сжимается, то его параметры А, l и p изменяются и, как следствие, меняется R.Это дает возможность измерять очень малые перемещения На рис 3 4(а) показан отрезок проволоки (тензодатчик), который удлиняется на величину ∆L при прикладывании растягивающих усилий. Используя разложение в ряд, можно вычислить чувствительность этого проволочного датчика деформации:
3.2 Входные преобразователи
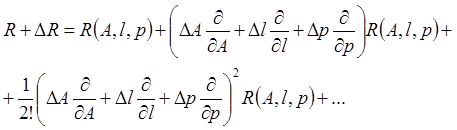 |
Если каждая из величин ∆A/А, ∆L/L и ∆р/ р меньше 1, а кривизна в точке r(a,l,p) мала, то можно пренебречь членами более высоких порядков. Вычитая R = R(A,l,p) из обеих частей равенства, получаем следующее дифференциальное уравнение:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.