156 Измерительные приборы в электрических измерениях
 |
где — θ угол поворота.
Из этих двух выражений с очевидностью следует, что можно получить сигнал, пропорциональный скорости объекта, вычисляя производную выходного сигнала датчика смещения. Не составляет труда создать электронную схему для дифференцирования электрического сигнала. Однако имеется одно неудобство, связанное с этим: разрывность выходного сигнала датчика смещения (из-за конечного разрешения) будет причиной больших импульсных помех в сигнале, характеризующем скорость. Кроме того, высокочастотный шум и другие помехи возрастают при дифференцировании. Это связано с тем, что коэффициент передачи дифференциатора возрастает линейно со скоростью 6 дБ/октаву с увеличением частоты. Поэтому сигнал, выражающий скорость, полученный путем дифференцирования сигнала, характеризующего смещение, почти всегда страдает присутствием шума и помех.
Другая возможность получения значения скорости состоит в интегрировании линейного ускорения a(f):
 |
 |
Индуктивные датчики скорости
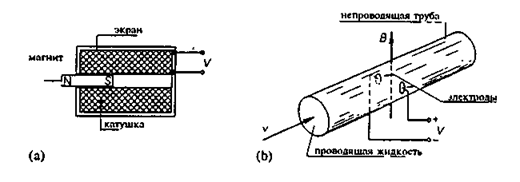
В индуктивных датчиках скорости движение объекта с некоторой скоростью приводит к изменению магнитного потока Ф, который наводит эдс в проводнике.
3.2 Входные преобразователи

Это наведенное
напряжение характеризует скорость измеряемого объекта. Сказанное становится очевидным
при обращении к рис. 3.11 (а). Напряжение, наведенное в i-м витке
катушки этого индуктивного датчика скорости, определяется соотношением:
Учитывая эдс,
наведенную во всех п витках, находим напряжение на зажимах катушки:

Так как Фi;
= Фi (х) , где х — положение магнита
относительно центра катушки,
а х = x(t), получим:
Таким образом, выходное напряжение V пропорционально скорости v магнита для заданной величины х. Чувствительность датчика равна k. К сожалению, датчик является нелинейным, поскольку k = k(x). Поэтому, этот тип датчика также часто используется в балансной схеме. Так как в датчике скорости, приведенном на рис. 3.11(а), перемещается магнит, он назван магнитодинамическим.
|
|
|
Рис.3.11.Индуктивный датчик скорости.(а) Гнитодинамический датчик скорости. (b) Индукционный датчик скорости потока. |
Другой пример индуктивного датчика скорости был дан на рис. 3.3. Здесь магнит неподвижен, а движется катушка, поэтому этот датчик называется электродинамическим. На рис. 3.1 1(b), в качестве примера, показан датчик скорости потока. По трубе, находящейся в сильном магнитном поле с индукцией В, между двумя электродами течет проводящая жидкость. Магнитное поле вызывает появление на электродах разности электрических потенциалов, которую можно рассчитать следующим образом: предположим, что индукция В и скорость потока постоянны по всему поперечному сечению
Измерительные приборы в электрических измерениях____
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.