 |
 |
 |
Величину индуктивности, являющуюся мерой смещения, можно определить, используя мостовую схему или включив катушку индуктивности в схему генератора.
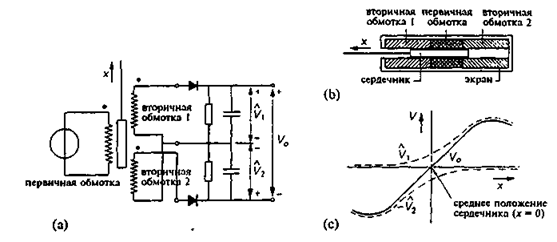
Индуктивным датчиком, в котором используется изменение взаимной индукции между двумя катушками, является дифференциальный трансформатор. Как следует из названия, этот датчик используется в балансной схеме (см. рис. 3.9). Величина связи между первичной и вторичной обмотками зависит от положения сердечника. Например, если сердечник сдвинут вверх
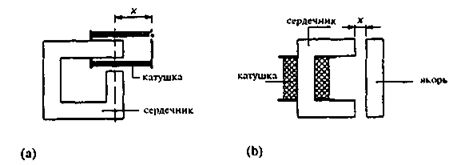
Рис. 3.8. (а) Индуктивный датчик смещения, основанный на изменении действующего числа витков. (b) Индуктивный датчик с изменяемым магнитным сопротивлением.
|
|
|
3.2 Входные преобразователи |
Рис. 3.9. (а) Дифференциальный трансформатор для измерения смешения с двумя пиковыми детекторами. (b) Поперечный разрез дифференциального трансформатора, (с) Передаточная характеристика V = V(x).
(рис. 3.9(а)), то связь между первичной обмоткой и верхней вторичной обмоткой увеличивается и поэтому увеличивается выходное напряжение на этой обмотке. Переменное напряжение верхней вторичной обмотки преобразуется пиковым детектором в постоянное напряжениеV1. На рис. 3.9(с) это напряжение представлено как функция положения х сердечника. На графике хорошо видна сильная нелинейность этой функции. Выпрямленное напряжение нижней вторичной обмотки представлено на том же графике как -V2. Сумма этих двух напряжений образует выходное напряжение V0= =V1-V2 . Для малых смещений х центра сердечника относительно положения х = 0 выходное напряжение V0 линейно зависит от х: нелинейность характеристик двух рассмотренных цепей полностью компенсируется. Дифференциальная чувствительность рассмотренного датчика смещения пропорциональна напряжению источника, подключенного к первичной обмотке. Существуют дифференциальные трансформаторы для измерения смещения в диапазонах от ± 1 мм до ±25 см. Нелинейность во всем диапазоне равна приблизительно 2,5х10-3. Рабочие частоты находятся в пределах от 50 Гц до 10 кГц. Чувствительность дифференциального трансформатора при расположении сердечника в среднем положении и напряжении питания 1 В составляет для диапазона измерения ±1 мм величину порядка 240 мкВ / мкм, а для диапазона ±25 см — приблизительно 4 мкВ / мкм.
Оптические датчики смещения
Смещение можно обнаружить также оптически с помощью кодирующей ленты (при поступательном движении) или поворотного кодера (при вращении). На рис.3.10(а) показан оптический датчик смещения, в котором применена кодирующая лента, на которой в несколько рядов чередуются прозрачные и непрозрачные участки. Положение ленты преобразуется непосредственно в цифровой сигнал узким лучом света и рядом световых датчиков.
Измерительные приборы в электрических измерениях
Цифровой код определяется расположением прозрачных и непрозрачных полос на ленте.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.