5.
Произведите расчет в тестовом модульном режиме. Для этого необходимо выбрать
пункт меню ″Модульный″ в меню ″Расчет″ или нажать клавишу ![]() на панели инструментов программы.
(Внимание. Время расчета может занять до 15-20
мин.)
на панели инструментов программы.
(Внимание. Время расчета может занять до 15-20
мин.)
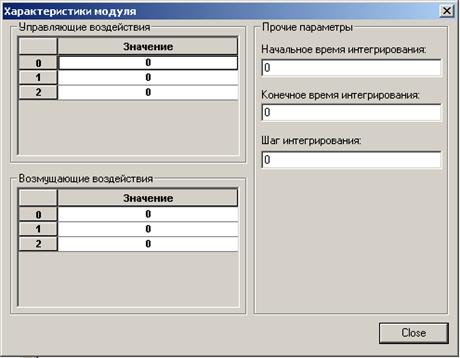
Рис. 2
6. После окончания расчетов вы можете просмотреть графики и вывести их на печать, щелкнув правой клавишей мыши над модулем в правой части экрана и выбрав в появившемся меню пункт ″Графики″.
Если во время расчета программа выводит сообщение о синтаксической ошибке, наиболее вероятно, что в написании формул воздействий вы ее допустили. Внимательно проверьте эти формулы.
Программа имеет возможность подгружать значения постоянных времени, коэффициентов, шага, начального и конечного времен интегрирования и других переменных из заранее подготовленного текстового файла. В нем значение каждой переменной пишется на отдельной строчке в том же порядке, в каком они перечислены в свойствах модуля. В конец файла добавляются начальное время интегрирования, шаг интегрирования и конечное время интегрирования. Чтобы выполнить загрузку данных из такого файла, вам необходимо нажать кнопку ″Внешние данные″ в свойствах модуля (см. рис. 1) и выбрать приготовленный файл.
Написание программы для контроллера. Программа для контроллера пишется в отдельном файле и оперирует с теми переменными, которые описаны внутри модулей. При этом перед названием переменной добавляются имя модуля и подчерк. Массивы управляющих и возмущающих воздействий описываются, как массивы U [номер воздействия] и MS [номер воздействия]. Контроллер понимает команду условного оператора if (условие).
В качестве примера далее рассмотрена программа для системы без обратной связи с контроллером, которая на единственный модуль, названный mod1, в течение первых 100 мс дает воздействие 0,1, потом в течение 200 мс не дает никакого управляющего воздействия, а затем дает управляющее воздействие 1, но при этом накладывается возмущающее воздействие, описывающееся формулой
2*cos(2*t)+2*sin(2*t)+1,5*cos(3*t)+1,5*sin(3*t)+0,5*cos(7*t)+0,6*sin(7*t).
Данная программа будет выглядеть так:
mod1_U[0]=0,1;
mod1_MS[0]=0;
if(t>0,3)mod1_MS[0]=2*cos(2*t)+2*sin(2*t)+1,5*cos(3*t)+1,5*sin(3*t)+0,5*cos(7*t)+0,6*sin(7*t);
if(t>0,1) mod1_U[0]=0;
if(t>0,3) mod1_U[0]=1;
Содержание отчета. Включает в себя следующие элементы: функциональные схемы систем управления промышленными установками; математические описания процессов управления с учетом технологических свойств обрабатываемых материалов и взаимосвязей сепаратных систем управления; структурные схемы систем управления; расчеты параметров регуляторов; результаты исследования систем управления и взаимного влияния сепаратных систем управления при заданных видах управляющих и возмущающих воздействий и различных настройках регуляторов; выводы по работе. Оформление отчета следует выполнять в соответствии с методическими указаниями по выполнению основных документов СПбГЭТУ ″ЛЭТИ″.
Далее изложены методические указания к отдельным лабораторным работам, включающие описания работ, их содержание, а также порядок их выполнения.
Работа 1
Целью работы являются: исследование систем управления движением производственных механизмов для разных вариантов компоновки электродвигателей, механических узлов и датчиков; приобретение навыков составления математических моделей электроприводов с учетом упругих связей в звеньях механизмов; изучение состава технических средств.
1.1. Содержание работы
Функциональные схемы систем управления линейными перемещениями механизмов для различных вариантов компоновки электродвигателей М, датчиков скорости ДС и датчиков положения ДП показаны на рис. 3.1 стр. 144 и рис. 3.2 стр. 145 [1].
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.