Система управления текущим положением ножей ![]() работает в программно-циклическом
режиме, обеспечивая при
работает в программно-циклическом
режиме, обеспечивая при ![]() в переменную
скорость
в переменную
скорость ![]() в течение каждого цикла.
Информация о скоростях
в течение каждого цикла.
Информация о скоростях ![]() и
и ![]() получают
с помощью импульсных датчиков ИД1, ИД2. Более подробно этот процесс изложен в
[3].
получают
с помощью импульсных датчиков ИД1, ИД2. Более подробно этот процесс изложен в
[3].
В
соответствии с заданными технологическим режимом резания полотна, режимом
пуска и останова станка необходимо рассчитать требуемую траекторию ![]() на цикле реза, выполнить
математические описания, расчеты и исследования на ПЭВМ системы управления
станком с учетом упругих свойств электроприводов и натянутого картона.
на цикле реза, выполнить
математические описания, расчеты и исследования на ПЭВМ системы управления
станком с учетом упругих свойств электроприводов и натянутого картона.
При математическом описании и расчете данной системы управления следует иметь в виду, что в функциональном отношении тракт Р-ПВ поперечно-резательного станка аналогичен тракту Р1–В1, В2 продольно-резательного станка. Но в рассматриваемой системе контроль натяжения выполняется косвенно по току якоря и ЭДС электродвигателя М1. При рабочем функционировании станка электродвигатель М1 работает в генераторном режиме. Аналогична и механическая модель системы, учитывающая упругие свойства натянутого полотна картона и приводов. Упругими деформациями в приводе рулона Р можно пренебречь, а упругую систему М2-ПМ2 следует упрощенно рассматривать как двухмассовую.
Упрощенная механическая модель системы, приведенная к вращательному движению, не учитывающая скоростное демпфирование и отражающая места съема информации и приложения воздействий, показана на рис 7.2.
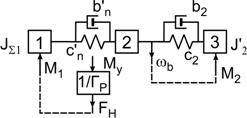
Рис. 7.2
Для этой модели можно записать:
 ;
;
 ,
,
где ![]() ;
; ![]() .
.
Постоянные
времени ![]()
![]()
![]()
![]() и
соответствующие им частоты упругих колебаний
и
соответствующие им частоты упругих колебаний ![]()
![]()
![]()
![]() определяется по методике [4], аналогично
тому, как это делалось в работе 1.
определяется по методике [4], аналогично
тому, как это делалось в работе 1.
Если пренебречь
моментом потерь в передаточном механизме ПМ1, то натяжение полотна ![]() может быть определено по формуле
может быть определено по формуле ![]() , где
, где ![]() ,
, ![]()
![]() - соответственно, постоянная электродвигателя
М1, ток якоря, поток, а
- соответственно, постоянная электродвигателя
М1, ток якоря, поток, а ![]()
![]() - коэффициент редукции ПМ1 и радиус рулона. Натяжение будет
пропорционально току
- коэффициент редукции ПМ1 и радиус рулона. Натяжение будет
пропорционально току ![]() при постоянстве соотношения
при постоянстве соотношения
![]() . Последнее можно осуществить, если
обеспечить
. Последнее можно осуществить, если
обеспечить
постоянство ЭДС электродвигателя. Действительно, так
как
![]()
![]()
![]()
![]()
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.