 |
Рис. 5.1
В соответствии с заданным технологическим режимом работы машины необходимо выполнить математические описания, расчеты и исследования на ПК систем управления двумя смежными секциями с учетом упругих свойств бумажного полотна. Упругими деформациями в приводах, редукторах, муфтах и валах кинематических передач от двигателей до механизмов секций можно пренебречь.
Функциональная схема системы управления двумя смежными секциями показана на рис. 5.2. Механизмы секций машины представлены в виде одного ведущего вала, к которому приведены остальные валы секций. Взаимосвязь сепаратных систем управления секциями осуществляется по цепи нагрузки через общее обрабатываемое полотно бумаги и по цепи управления для задания общей скорости электроприводов и соотношения скоростей секций.
Для математического описания системы управления и ее расчета можно использовать материал по системам стабилизации скорости многодвигательных электроприводов [1]. На рис. 5.3 приведена структурная схема системы управления двумя смежными секциями. Влияние остальных секций учтено в виде сигналов, показанных пунктирными линиями.
Исходными данными к выполнению работы являются: данные секций и режим работы машины; состав технических средств (комплектных электроприводов, датчиков и задающих устройств) систем управления; параметры, характеризующие упругие свойства полотна.
 |
|
5.2. Порядок выполнения работы
1. Ознакомиться с техническим описанием комплектных электроприводов, датчиков, устройств задания скорости и соотношения скоростей.
2. Составить математическое описание процесса стабилизации скорости и соотношения скоростей секций с учетом упругих свойств бумажного полотна в межсекционных промежутках.
3. Выбрать и рассчитать регуляторы системы стабилизации в соответствии с вариантом задания.
4. Подготовить данные для моделирования системы на ПЭВМ.
5. Получить переходные процессы в системе управления следующими режимами: 1) при ступенчатых изменениях управляющих воздействий по скорости каждой секции и по соотношению скоростей (возмущающие воздействия отсутствуют); 2) при ступенчатых изменениях возмущающих воздействий в каждой секции; 3) при ступенчатых и линейных изменениях управляющих воздействий и одновременном изменении возмущений в виде волновых процессов.
6. Исследовать взаимное влияние сепаратных систем управления и при существенном проявлении этого влияния устранить его изменением настроек регуляторов. Взаимное влияние оценивать по среднеквадратичным отклонениям скоростей и межсекционных натяжений при ступенчатых изменениях задающих и возмущающих воздействий в смежных секциях.
Работа 6
ПРОДОЛЬНО-РЕЗАТЕЛЬНЫМ СТАНКОМ
Целью работы являются: изучение технических средств; расчет и исследование системы управления продольно-резательным станком, режущим бумажное полотно большой ширины на мерные полосы меньшей ширины.
6.1. Содержание работы
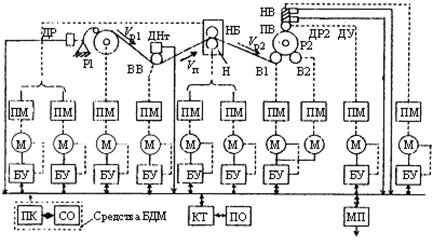
Функциональная
схема системы управления станком показана на рис. 6.1. При перемотке
бумажного полотна с рулона Р1 на несколько рулонов Р2 происходит продольное
резание полотна на мерные полосы дисковыми ножами (Н). Число ножей на единицу
меньше числа полос бумаги. В данном случае имеется шесть ножей. Управление
линейной скоростью движения полотна ![]() производится с
помощью механизма периферического наката, содержащего валы В1 и В2 с
постоянными диаметрами, к которым с помощью прижимного вала ПВ и нажимного
винта НВ прижимаются рулоны
производится с
помощью механизма периферического наката, содержащего валы В1 и В2 с
постоянными диаметрами, к которым с помощью прижимного вала ПВ и нажимного
винта НВ прижимаются рулоны
|
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.