также хороших технических характеристик системы управления.
Посмотрим, как робот «Пума» может выполнять различные виды работ.
1. Установка и снятие детали со станка или станков (рис. 4, а). Робот извлекает деталь из шпинделя станка 1 и устанавливает ее на промежуточную позицию 2,вставляет в станок заготовку и включает цикл обработки. После этого он поворачивается к другому станку 4, снимает с него готовую деталь и укладывает в тару 3. Затем деталь из промежуточной позиции 2 устанавливается в станок 4. Система управления робота включает этот станок, и робот снова поворачивается для обслуживания станка 1.
2. Дуговая сварка кузова автомобиля (рис. 4, б). Грузоподъемности робота достаточно для удержания в схвате сварочной головки 1. Кузов автомобиля 2 движется по конвейеру 3 и останавливается точно на позиции сварки. По сигналу фотоэлемента включается программа робота. Так как процесс дуговой сварки происходит довольно медленно, на этой операции, как правило, используются несколько роботов с разных сторон конвейера.
3. Окраска распылением (рис. 4, в). На схвате робота укреплен пульверизатор 1. Изделие 2 может иметь фактически любую сложную форму. Широкие манипуляционные возможности робота позволяют перемещать пульверизатор под определенным углом к окрашиваемой поверхности, что необходимо для получения высокого качества окраски поверхности.
4. Обслуживание прессов (рис. 4, г). Робот «Пума» используется на этой операции, хотя целесообразность того многими специалистами оспаривается как экономически неоправданная. Робот берет заготовку с позиции загрузки 1 и последовательно передает ее на позиции обработки 2, 3 и 4. Готовое изделие переносится на позицию 5.
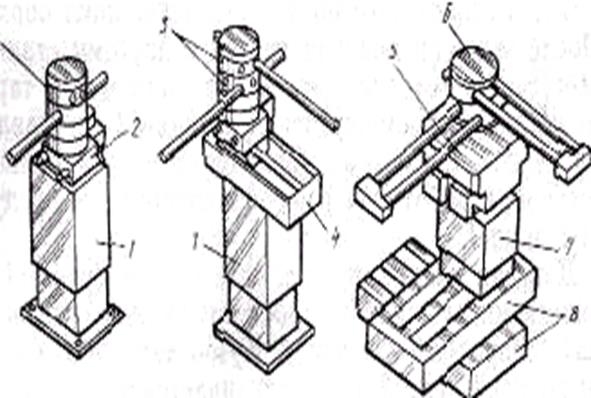
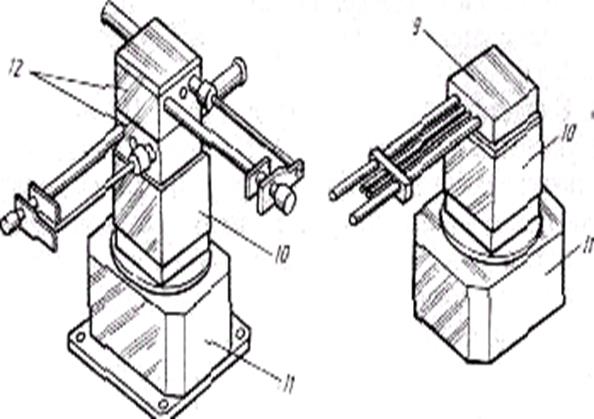
Таким образом, один и тот же промышленный робот может выполнять много разнообразных операций. Но всегда ли в этом есть необходимость? На крупном предприятии, где роботу «гарантирована» длительная работа, на одной операции, целесообразно использование специализированных роботов. Однако в мелкосерийном и серийном производстве, где происходит частая смена продукции, выпускаемой предприятием, и иногда в течение одной смены необходимо обрабатывать различные детали, более правильно будет, наверное, пойти на дополнительный расход и приобрести универсальный промышленный робот типа «Пума», тем более что до надежности, долговечности, точности он практически не уступает специализированным роботам. Промышленный робот модели «Гном» с выдвижной рукой (рис. 5), работающий в цилиндрической системе координат, является специализированным с небольшим числом степеней подвижности и имеет модульную конструкцию манипулятора. Из набора модулей подъема 1, 8, 10, поворота 2, 5, 11, руки 3, 6, 9, 12 и линейных перемещений 4, 7 можно собирать множество возможных структур для различных применений.
Рука этого манипулятора, выполненная в виде пневмоцилиндра и оснащенная схватом, имеет возможность выдвигаться на расстояние, достаточное для обслуживания пресса. Например, рука установлена на модуле вертикального подъема, который в свою очередь размещен на модуле поворота в горизонтальной плоскости. Весь манипулятор крепится на основании. Общее число степеней подвижности, как мы видим, равно трем. Этого достаточно для обслуживания прессов, загрузки небольших станков, укладки и перегрузки деталей с транспортера на транспортер, выполнения несложных операций сборки. Стоимость такого робота невелика, а быстродействие, надежность высокие. Его целесообразно использовать на высокопроизводительном оборудовании с коротким временем цикла обработки.
 |
Два направления развития робототехники не исключают, а взаимно дополняют друг друга. По мере расширения областей применения промышленных роботов будет расти количество как универсальных, так и специализированных моделей.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.