Исполнительные механизмы, служащие для преобразования энергии какого-либо вида в поступательное или вращательное движение сопряженных между собой звеньев кинематической цепи робота, называются приводом. Привод играет роль «мышц» робота.
К приводу, независимо от его устройства, предъявляется ряд общих требований. Прежде всего, необходимо, чтобы соотношение выходной мощности к собственным габаритам привода было максимальным. Большее значение имеет отношение выходной мощности к собственной массе. Скорость перемещения звеньев робота и нагрузки на привод меняется в широких пределах, и во всех режимах необходимо обеспечить плавное движение. Поэтому важно, чтобы привод имел большой диапазон регулирования скорости и выходной мощности. Привод должен обеспечивать высокую точность и повторяемость движений. Вместе с тем к нему предъявляется еще ряд требований, которые одновременно удовлетворить нельзя, и всегда приходится идти на компромисс и чем-то поступаться, чтобы выиграть в том, что для каждого конкретного случая представляется более важным. Привод должен иметь максимальный коэффициент полезного действия, невысокую стоимость, удовлетворять требованиям техники безопасности, быть максимально простым в изготовлении.
От типа манипуляторов во многом зависят требования к их приводам. Так, например, у простых манипуляторов циклового действия во многом снижаются требования к приводу, поскольку части таких манипуляторов совершают одни и те же заранее заданные движения по простой траектории.
Рассмотрим, например, движение руки робота, обслуживающего токарный полуавтомат. Траектория и величина перемещения (выдвижения) руки, ее скорость от цикла к циклу остаются постоянными. Единственным требованием к регулировке скорости является обеспечение плавного разгона и торможения руки.

Однако во всех манипуляторах, как универсальных, так и специализированных, требование к обеспечению точности остается неизменным.
По виду обеспечиваемого движения различают приводы поступательного и вращательного движения; по типу энергоносителя — электрические, гидравлические, пневматические.
Рассмотрим устройство каждого из типов привода по степени возрастания их сложности.
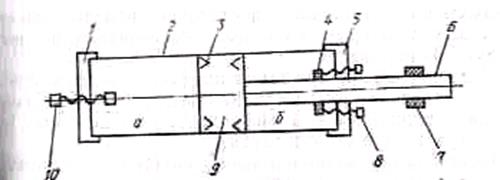
Начнем с пневматического привода. Энергоносителем в нем является сжатый воздух. Пневмодвигатель поступательного движения представляет обычный поршневой пневмоцилиндр (рис. 18). Он состоит из гильзы 2, закрытой крышками 1 и 5, поршня 9, штока 6 и уплотнительных устройств (резиновых манжет или колец) 3. Принцип его действия чрезвычайно прост. Подавая давление в полость а пневмоцилиндра, мы тем самым заставляем поршень 9 вместе со штоком 6 совершать поступательное движение и выполнять работу по перемещению выходного звена. Чтобы вернуть поршень в первоначальное положение, достаточно подать давление в полость б, открыв клапаны, обеспечивающие выход воздуха из полости а.
Усилие, развиваемое таким пневмоцилиндром, P=psk, где р—давление в полости цилиндра; s—эффективная площадь поршня; k — коэффициент, учитывающий потери на трение и утечки воздуха.
Величина перемещения штока может быть различной, но, как правило, не должна превышать 10 d (d—внутренний диаметр гильзы цилиндра).
Для регулировки величины перемещения, если только ограничение перемещения осуществляется не по приводимому в движение звену, используются упоры, расположенные непосредственно на частях цилиндра. Так для ограничения хода штока вправо служит упор 4, перемещаемый винтами 8, а для регулировки хода влево— либо упор-винт 10 в крышке 1, либо упор-гайка 7 на штоке 6.
Но чаще всего используется регулировка величины перемещения именно упорами на приводном звене (рис. 19). Пневмоцилиндр 1 приводит в движение каретку 4 по направляющей 3, закрепленной на кронштейне 6. Величина хода в этом случае задается: вправо—упором гайкой 5, влево—такой же гайкой 2. Общая величина хода составляет L—b.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.