![]()
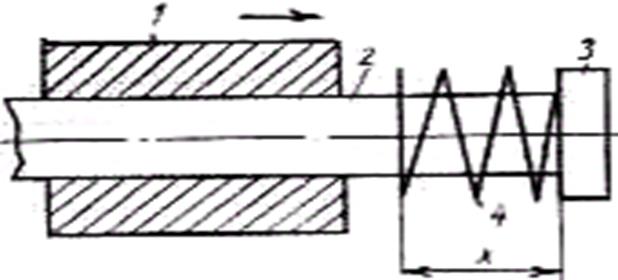
Основным недостатком гидропривода является необходимость гидростанции и устройств для подготовки очистки масла (используемого в качестве рабочей жидкости). Кроме того, из-за нагрева масла и его утечки уменьшается точность гидропривода, вследствие насыщения воздухом масло теряет свойства не сжимаемости устройства торможения, или демпфирующие устройства приводов, устанавливают, как правило, на приводимом в движение звене промышленного робота. Самым простым демпфером является обычная пружина (рис. 24). Каретка 1 движется по направляющей 2. На последнем участке хода она набегает на пружину 4, упирающуюся в упор 3. По мере сжатия пружины возрастает сопротивление движению, и каретка тормозится.
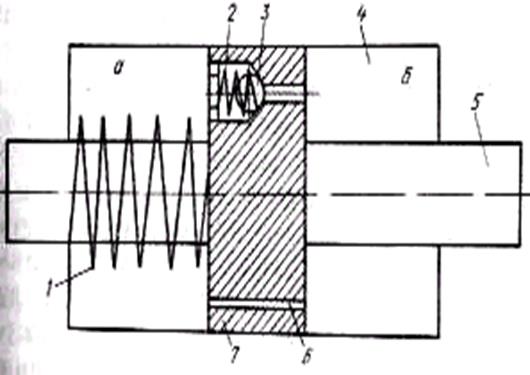

Наибольшее распространение получил гидравлический демпфер (рис. 25). Он состоит из заполненного маслом корпуса 4, в котором движется поршень 7 с обратным клапаном в виде шарика 3 и пружины 2. В поршне имеется отверстие 6 малого диаметра. Поршень связан со штоком 5 и подпружинен пружиной 1. При нажатии на шток 5 поршень 7 идет влево, и масло через отверстие 6 из полости а перетекает в полость б. Чем выше скорость нажатия на шток, тем больше сопротивление при перетекании масла. После снятия воздействия со штока поршень пружиной 1 отводится в первоначальное положение, а масло перетекает через обратный клапан, отжав шарик 3 и пружину 2. Наиболее важными характеристиками демпфера являются его ход и воспринимаемая энергия.
Электрический привод лишен многих недостатков пневмо- и гидропривода. Основу его составляют электродвигатели, как правило, вращательного и лишь изредка линейного движения, Чаще всего используются двигатели постоянного тока либо шаговые. Применение этих двигателей обусловлено тем, что они позволяют при большом крутящем моменте иметь большой диапазон регулирования скорости. В двигателях постоянного тока это обеспечивается изменением напряжения их питания.
Принцип действия шаговых двигателей заключается в том, что их вал совершает поворот на определенный угол при подаче на обмотки одного импульса заданных длительности и величины напряжения. Важной характеристикой этих двигателей является приемистость, т. е. максимально возможное число импульсов, которое может отработать этот двигатель в единицу времени. Подавая импульсы в пределах приемистости двигателя с определенной частотой, можно получить желаемую скорость его вращения.
Приводы на базе электродвигателей обычно требуют элементов передачи движения—редукторов. Это вызвано тем, что электродвигатели имеют большую скорость вращения вала, а необходимая скорость перемещения выходного звена (например, привода перемещения руки робота) значительно меньше. Поэтому точность позиционирования приводимых звеньев во многом определяется точностью редукторов.
При использовании электродвигателей в качестве привода робота сложность состоит в том, что он должен обеспечивать эксплуатацию в режиме непрерывного короткого замыкания в течение достаточно длительных промежутков времени. Этот режим возникает в тех случаях, когда вращающий момент должен быть приложен к звену, а звено должно оставаться неподвижным. При этом в обычном двигателе постоянного тока с параллельным возбуждением при постоянном напряжении питания величина потребляемого тока значительно возрастает, что приводит к перегреву двигателя. Развитие современных методов управления двигателями позволяет обеспечить сохранение постоянного значения потребляемого тока в режиме непрерывного короткого замыкания. Такими возможностями обладают, например, безколлекторные двигатели постоянного тока.
Высокоэффективны двигатели постоянного тока с возбуждением от постоянных магнитов. Они имеют высокое отношение мощности к объему и мощности к массе.
В ряде отечественных и зарубежных роботов для поступательного перемещения звеньев применяются линейные индукционные двигатели.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.