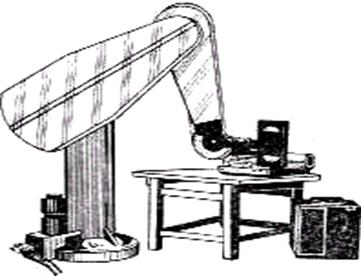
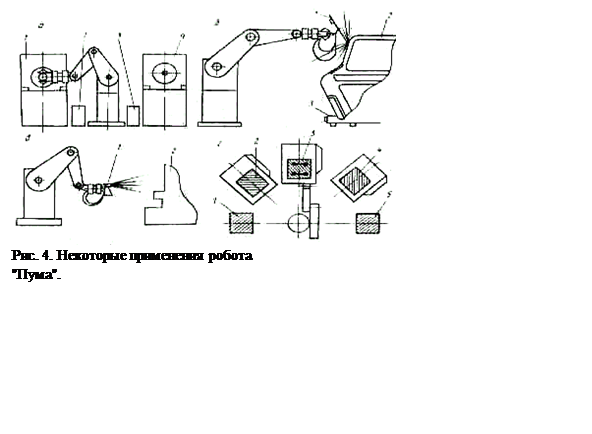
Выполняя конкретную технологическую операцию, человек не полностью использует всю зону действий руки. В этом и нет необходимости. Каждая операция требует движения определенного вида. При проектировании промышленных роботов существует две тенденции. Первая - универсализация, т. е. создание манипуляторов, возможности перемещения которых максимально приближались бы к возможностям человеческой руки (их поэтому часто называют антропоморфными) и которые можно было бы использовать практически на технологических операциях всех видов. Вторая тенденция— создание манипуляторов, движения которых отвечали минимуму требований для выполнения конкретной технологической операции. Так появились специализированные промышленные роботы—сварочные, окрасочные, для листовой штамповки и т. д. Например, манипулятор для обслуживания пресса может иметь всего две степени подвижности, которые используются для подъёма детали из штампа и выноса ее за его пределы.
Что же лучше: универсальность или специализация? Что выгоднее: создать один сложный промышленный робот, почти в точности повторяющий движения руки человека, который можно было бы использовать на всех или почти всех производственных операциях, либо разработать группу простых специализированных промышленных роботов с ограниченным числом степеней подвижности, которые будут, безусловно, проще, надежнее и дешевле?
Ответ на этот вопрос не может быть однозначным. Он определяется конкретной производственной ситуацией, теми функциональными задачами, для выполнения которых предназначен робот.
Интересно рассмотреть по аналогии кинематику руки человека как исполнительного органа при обслуживании технологического оборудования.
Как известно, рука человека представляет три шарнирно соединенных звена: плечо, предплечье и кисть. Нетрудно подсчитать, что плечо имеет пять степеней подвижности. Рука, оставаясь прямой, может поворачиваться вокруг всех трех осей (три степени подвижности), а само плечо может двигаться взад-вперед и вверх-вниз (еще две степени подвижности). Предплечье, соединенное с плечом в локтевом суставе, имеет две степени подвижности: сгиб руки в локте и вращение предплечья вокруг локтевого сустава. Кисть руки имеет еще две степени подвижности: она может двигаться относительно предплечья в двух плоскостях. Итак, рука человека (не считая подвижности пальцев) имеет девять (5+2+2) степеней подвижности.
Зону досягаемости руки (т. е. рабочую зону) можно представить в виде части сферы с радиусом R, примерно равным длине руки, и центром (полюсом) р, совпадающим с плечевым суставом.
Может возникнуть вопрос: зачем руке так много степеней подвижности, если, как мы показали, для достижения любой точки в пространстве достаточно трех?
Причина, очевидно, в том многообразии применений, которые природа определила для руки человека, и в запасе прочности, который предусмотрен
для всего живого. Трудно, наверное, найти такую работу, где были бы задействованы все степени подвижности руки (а их вместе с пальцами насчитывается 27), но совершенно ясно, что время от
времени мы используем каждую из них (пример, когда приходится выполнять работу в условиях ограниченного пространства).
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.