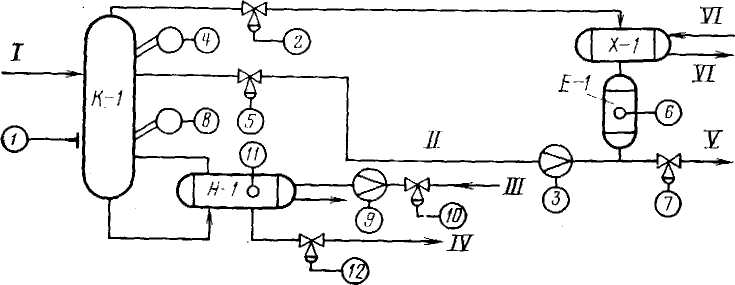
Рис. 14. Автоматизация установки регенерации метанола.
/ — насыщенный метанол; //—флегма; /// — пар; IV — вода; V — метанол; VI — вода ется с помощью регулятора температуры в верхней части колонны, состоящего из датчика температуры 4, датчика расхода флегмы 3, блока суммирования и регулирующего клапана 5.
Кубовый продукт подогревается в выносном кипятильнике НА.
Регулирование температуры в нижней части колонны осуществляется с помощью регулятора температуры 8 и регулирующего клапана 10, установленного на линии подачи пара в кипятильник НА. С блока соотношения на клапан передаются сигналы регулятора температуры 8 и датчика расхода 9.
Вода в виде кубового продукта отводится из кипятильника НА, с помощью регуляторов уровня 11, 12.
ОРГАНИЗАЦИОННЫЕ СТРУКТУРЫ УПРАВЛЕНИЯ ГАЗОДОБЫВАЮЩИМИ ПРЕДПРИЯТИЯМИ
Газодобывающее предприятие (ГДП) как объект управления представляет собой большую систему ввиду сложности производственно-технологического комплекса, звеньев и отдельных элементов, включенных в общую систему управления.
Организация управления строится исходя из общих задач управления ГДП, особенностей технологических объектов, а также объемов технологических информационных потоков и организации процессов сбора, передачи и переработки информации. Объекты управления основного производства ГДП рассредоточены на большой территории и представляют собой сложный комплекс технологических процессов добычи, сбора и подготовки газа и конденсата к транспорту. Принципы построения системы управления основным производством определяются в основном степенью рассредоточения этих объектов, а также технологией процессов подготовки газа и конденсата к транспорту [41].
3* 35
Под структурой управления понимается не только способ соединения каналов связи, но также и способ разделения функций управляющей системы между функциональными частями и размещением аппаратуры, перерабатывающей информацию, по узловым точкам системы. Характер распределения и обработки информации на ГДП определяется общим алгоритмом управления, который наиболее полно характеризует структурные отношения в системе.
Поскольку структура управления ГДП многоуровневая, необходимо более конкретно определить функции каждого уровня, доказать взаимосвязь этих уровней при достижении поставленной задачи управления.
Общий алгоритм управления ГДП в целом записывается как [33]
U = F(X), (1)
где
{?| , i=l, 2, . . .,«;
; /-1,2, . . ., m;
Применительно к системам управления множествами U и X определения функции F является множество значений входных и выходных параметров системы. Алгоритм задан так, что каждому значению ХеХ° однозначно соответствует значение U^U°. Однако сам процесс отыскания такого соответствия (процесс переработки входной информации X в управляющую информацию U) можно организовать по-разному, если функция F представлена в виде некоторого множества операторов.
Так, если Х={х\, ..., хп} — множество выходных параметров (источников информации), то функцию F можно представить в виде некоторого оператора от функций, определенных на подмножествах множества X:
где Ф; — оператор первого уровня; ф(1) = <р\1)
п\ —■ частичный оператор первого уровня. Оператор первого уровня Ф\ в свою очередь можно представить как где Фг— оператор второго уровня; ф[2) = ф\2) ( п2 — частичный оператор второго уровня.
36
В общем случае будем иметь где Я<*> = И*\ Ф&?\ . . .,<*$]
— множество частичных операторов k-то уровня.
Разбиение можно продолжать до тех пор, пока не будет выполнено равенство'
где Фт+i — представляет собой операцию тождества, т. е. оператор Фт настолько прост, что его уже не удается разбить на составные операторы.
Положим, что в системе, описываемой алгоритмом (1), число управляющих воздействий Ui и число выходов Хг- равны числу управляемых объектов N, т. е. каждый управляемый объект имеет управляющий вход и один информационный выход (состояние объекта характеризуется только одним параметром). Запишем для этого случая функцию (1) в виде где Ui — вход i-го объекта управления; XiCzX — множество выходов объектов системы, информация о которых используется для выработки управляющего воздействия Ui.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.