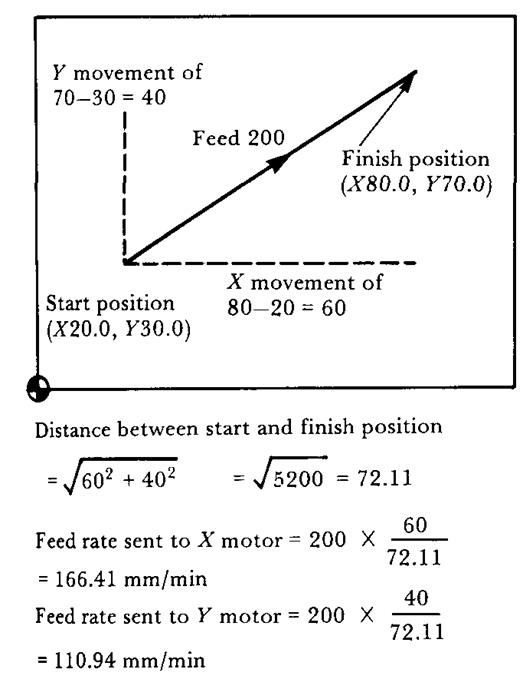
При программировании перемещения с линейной интерполяцией необходимо задавать величину скорости перемещения. Надо иметь в виду, что в случае одновременного перемещения по двум и более координатным осям заданная величина подачи будет относиться к вектору перемещения, соответственно подача вдоль каждой координатной оси будет меньше, как показано на рисунке ниже.
|
|
|
|
|
|
|
|
Рассмотрим примеры программирования перемещения по прямой линии. На рис. 2.7 представлен кадр программы, с учётом формата кадра N3 G2 X+42 Y+42 Z+42 I42 J42 K42 F4 M2.
При задании координат в абсолютной системе отсчёта:
N028 G01 X+003000 Y-001000 F0280
(где заданная подача равна 280мм/мин).
35
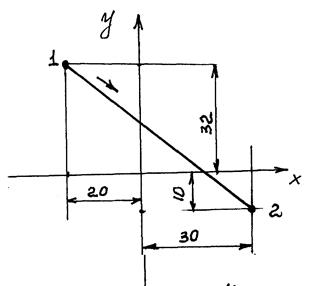 При задании координат в относительной системе отсчёта
(по приращениям):
При задании координат в относительной системе отсчёта
(по приращениям):
N028 G01 X+005000 Y –004200 F0280.
Если система может работать в обеих системах координат, то дополнительно нужно указывать G90 или G91. Необходимо помнить, что режим, определённый функцией G, сохраняется до его замены другой функцией с адресом G, Рис. 2.7
входящей в ту же группу.
2.2.5.3. Режим круговой интерполяции (G02 или G03).
Для того, чтобы в процессе обработки инструмент двигался относительно детали по дуге окружности необходимо задать системе один из двух возможных режимов круговой интерполяции, относящиеся к направлению движения инструмента вдоль дуги. Стандартные подготовительные функции, используемые в этом случае, следующие:
· G02 – перемещение по дуге окружности в направлении по часовой стрелке;
· G03 - перемещение по дуге окружности в направлении против часовой стрелки;
Большинство систем управления выполняют круговую интерполяцию одновременно только в одной плоскости. При этом необходимо указать нужную плоскость, что делается использованием следующих подготовительных функций:
· G17 для выполнения круговой интерполяции в плоскости ХУ
· G18 для выполнения круговой интерполяции в плоскости ХZ
· G19 для выполнения круговой интерполяции в плоскости УZ
В зависимости от конструкции встроенного интерполятора система может выполнять в одном заданном кадре программы круговую интерполяцию или только в одном квадранте, т.е. максимум 900 , или полностью по всей окружности, т.е. полностью 3600. В первом случае, если дуга хоть и меньше 900, но переходит в другой квадрант, необходимо разбивать эту дугу на два кадра и предусматривать промежуточную опорную точку в позиции пересечения дугой координатной оси.
36
Для перемещения с круговой интерполяцией необходимо задавать следующую информацию: в начале программы или непосредственно перед кадром круговой интерполяции нужно задать плоскость интерполирования; а в текущем кадре задать направление движения, координату точки конца дуги и координату центра дуги.
Как указывалось выше, для задания направления движения используются подготовительные функции G02 и G03. Для задания координаты конечной точки используются адреса Х и У. В относительной системе отсчёта для задания координаты центра используются адреса:
I – расстояние от начальной точки дуги до центра дуги вдоль координаты Х,
J – расстояние от начальной точки дуги до центра дуги вдоль координаты У,
К – расстояние от начальной точки дуги до центра дуги вдоль координаты Z.
Причём величины координат под этими адресами не имеют знака (+ или -)
В абсолютной системе отсчёта используются те же адреса, но уже определяют центр от нулевой точки системы координат. В зависимости от типа системы управления программирование можно осуществлять в абсолютной системе отсчета (определяемой подготовительной функцией G90) или в относительной системе отсчёта (определяемой подготовительной функцией G91). На рис. 2.8. представлен пример дуги, простирающейся более, чем в одном квадранте.
|
|
|
|
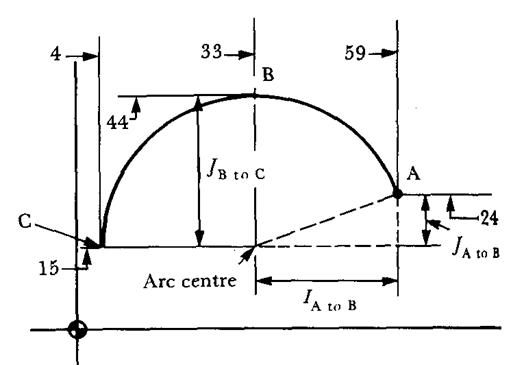
Рис. 2.8 Пример программирования дуги окружности
Для перемещения вдоль этой дуги против часовой стрелки сначала от точки А в
37
точку В, а затем в точку С, для одно квадрантной системы, можно записать программу в следующем виде (для системы, работающей с относительной системой координат и форматом кадра с плавающей точкой):
N35 G03 X-26.0 Y20.0 I26.0 J9.0 F200*
N36 X-29.0 Y-29.0 I0 J29.0*
Примечание: функция G03 является модальной, она сохраняется до прихода другой функции данной группы. Знак * означает конец строки (кадра).
Ещё один пример круговой интерполяции представлен на рис. 2.9.
|
|
|
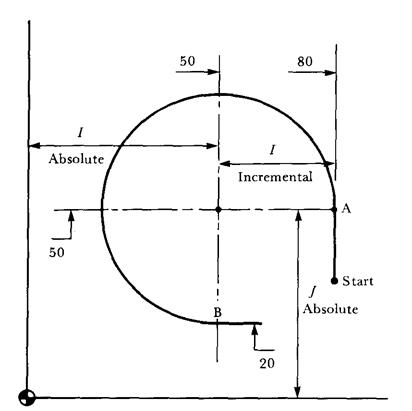
Рис. 2.9. Пример программирования дуги с мульти-квадрантным интерполятором
Для системы с мульти-квадрантным интерполятором, с учётом формата кадра с плавающей точкой и записи размерных перемещений в абсолютной системе отсчёта, кадры программы будут выглядеть следующим образом:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.