Электроприводы постоянного тока еще недавно были практически единственным видом широко регулируемого привода, которые обеспечивали все технологические установки, требующие точного управления сложным движением. Электроприводу переменного тока отводилась роль грубого, неуправляемого или примитивно управляемого источника механической энергии. В настоящее время положение дел в целом существенно изменилось. На рынке всех технически развитых стран появились широко и гибко управляемые электроприводы переменного тока, в частности с асинхронными двигателями. Их выпуск в ряде случаев превысил выпуск приводов постоянного тока.
Возникла техническая проблема – сделать до половины неуправляемых ранее простейших электроприводов переменного тока управляемыми и поднять за счет этого технический уровень различных технологических комплексов. Причины такого резкого изменения внимания к электроприводу переменного тока, во-первых, в простоте и невысокой стоимости машин переменного тока и, во-вторых, в новых возможностях управления ими современными техническими средствами, созданными развитием силовой электроники и информационной техники.
Принцип действия асинхронной машины, изобретенной более 100 лет назад (1889 г., М.О. Доливо-Добровольским), в самом общем виде состоит в следующем: один из элементов машины (обычно неподвижный – статор) используется для создания движущегося с определенной скоростью магнитного поля, а в замкнутых проводящих пассивных контурах другого элемента (подвижного – ротора) наводятся ЭДС, вызывающие протекание токов и образование сил (моментов) при их взаимодействии с магнитным полем. Все эти явления имеют место при несинхронном – асинхронном движении ротора относительно поля, что и дало машинам такого типа название «асинхронные».
Асинхронные машины имеют очень простые конструктивные решения. Статор обычно выполнен в виде нескольких расположенных в пазах катушек, а ротор – в виде «беличьей клетки» (короткозамкнутый ротор) или в виде нескольких катушек (фазный ротор), которые соединены между собой, выведены на кольца, расположенные на валу, и с помощью скользящих по ним щеток могут быть замкнуты на внешние резисторы.
Несмотря на простоту физических явлений, полное математическое описание процессов в асинхронной машине весьма сложно. Эта сложность порождена несколькими причинами:
· во-первых, все напряжения, токи, потокосцепления – переменные, т.е. характеризуются частотой, амплитудой, фазой или соответствующими векторными величинами;
· во-вторых, взаимодействуют движущиеся контуры, взаимное расположение которых изменяется в пространстве;
· в-третьих, магнитный поток нелинейно связан с намагничивающим током (проявляется насыщение магнитной цепи), активные сопротивления роторных цепей зависят от частоты (проявляется эффект вытеснения тока), сопротивления всех цепей существенно зависят от температуры и т.п.
В связи с этим нам важно особенно внимательно отнестись к соответствию выбранной модели и задачи, для решения которой она используется: вряд ли рационально простую задачу решать с помощью неоправданно сложной модели, а сложную задачу просто не удастся решить на основе примитивного представления машины.
Начнем с самого главного – напомним, как образуется движущееся (вращающееся) магнитное поле. Отвлечемся от всех деталей и будем рассматривать задачу в самом примитивном виде.
Пусть на статоре расположен виток
(катушка) А – X(рис. 4.1, а, б),по
которому протекает переменный ток ![]() , где
, где ![]() . Магнитодвижущая сила (МДС) FA, созданная этим током, будет пульсировать по оси витка
. Магнитодвижущая сила (МДС) FA, созданная этим током, будет пульсировать по оси витка ![]() (рис. 4.1, в, горизонтальные
штриховые стрелки). Если добавить виток (катушку) В – Y, расположенный под углом 90° к А – X, и пропускать по нему ток
(рис. 4.1, в, горизонтальные
штриховые стрелки). Если добавить виток (катушку) В – Y, расположенный под углом 90° к А – X, и пропускать по нему ток ![]() , то
МДС FB будет пульсировать по оси этого витка:
, то
МДС FB будет пульсировать по оси этого витка: ![]() (вертикальные стрелки).
(вертикальные стрелки).
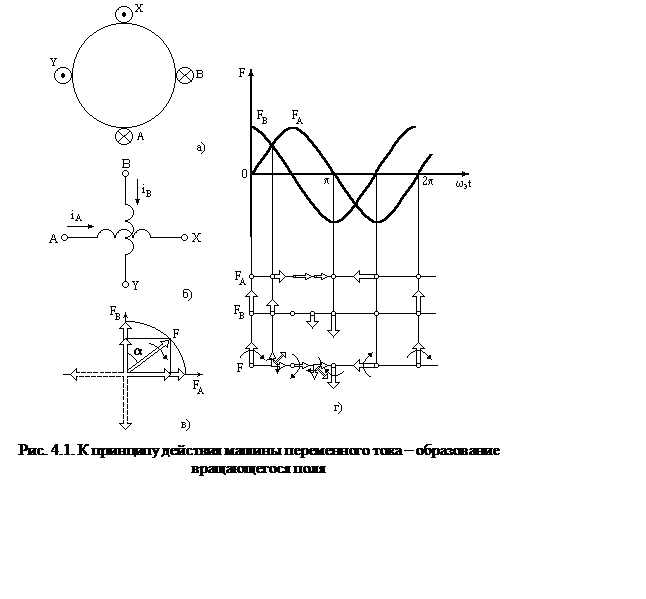
Вектор результирующей МДС будет
иметь модуль:
![]() , а его фаза (a) определится из условия:
, а его фаза (a) определится из условия: ![]() , т.е.
, т.е. ![]() .
.
Таким образом, мы видим, что вектор результирующей МДС при принятых условиях, т.е. при сдвиге двух витков в пространстве на p/2 и при сдвиге токов во времени на p/2, вращается с угловой скоростью wэ (рис. 4.1, г).
В общем случае, в симметричной 2pП – полюсной m-фазной машине при токах в обмотках, сдвинутых на угол 2 p/m, уравнение бегущей волны МДС имеет вид:
![]() ,
(4.1)
,
(4.1)
где t – полюсное деление, т.е. длина дуги,
соответствующая одному полюсу: х – координата точки (длина дуги от оси
обмотки), в которой определяется F;
t=pD/2pп;
D – внутренний диаметр статора; рп – число пар полюсов.
Координату х, в которой МДС
максимальна, найдем, положив ![]() , откуда
получим:
, откуда
получим: ![]() , т.е.
, т.е. ![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.