Линейная скорость перемещения волны определится как:
![]() , угловая скорость
, угловая скорость
![]() (4.2)
(4.2)
частота вращения
поля ![]() составит:
составит:
![]() .
(4.3)
.
(4.3)
Последние две формулы
очень важны, так как они связывают частоту сети (fs), число пар полюсов (рп)
и угловую скорость (w0) или частоту вращения
(n0) поля. Поскольку в общем случае w = wэ/pп, часто используют
не временные и геометрические углы, а электрические, имея в виду, что
временному углу 360° соответствует электрический угол 360 рп,
т.е. ![]() .
.
Таким образом, результирующий магнитный поток в машине при принятых нами условиях вращается с угловой скоростью w0 = 2pfs / рп.
Электромагнитные процессы при w = w0
Рассмотрим простейшие электромагнитные процессы в статорных цепях машины, предположив вначале, что ротор вращается с той же скоростью w0, т.е. его обмотки не пересекают силовых линий магнитного поля, и поле не оказывает существенного влияния на процессы.
В весьма грубом, но
иногда очень полезном приближении можно представить обмотку фазы статора как
идеальную
индуктивную цепь – некоторую катушку, к которой приложено переменное напряжение ![]() . В дальнейшем будем обозначать синусоидально изменяющиеся
переменные соответствующими заглавными буквами, если интерес представляют лишь их
значения (речь
будет идти о действующих значениях), либо будем добавлять точку вверху, показывая тем самым, что речь идет о временном векторе, имеющем амплитуду Um=
. В дальнейшем будем обозначать синусоидально изменяющиеся
переменные соответствующими заглавными буквами, если интерес представляют лишь их
значения (речь
будет идти о действующих значениях), либо будем добавлять точку вверху, показывая тем самым, что речь идет о временном векторе, имеющем амплитуду Um=![]() и фазу f.
и фазу f.
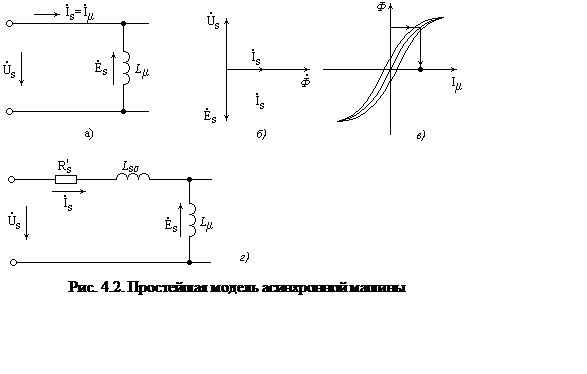
Очевидно, что напряжение Us уравновесится ЭДС самоиндукции (Es)(рис. 4.2, а, б)
Es = 4,44 Фfswskоб, (4.4)
где ws – число витков обмотки; kоб – коэффициент, зависящий от конкретного выполнения обмотки.
Можно приближенно считать, что магнитный поток определяется приложенным напряжением, частотой и параметрами обмотки:
![]() .
(4.5)
.
(4.5)
Ток в обмотке (фазе) статора Is определится при этом лишь реальной
характеристикой намагничивания машины, т.е. магнитным сопротивлением контура,
по которому замыкается
магнитный поток. В идеальном случае, которого на практике, конечно, быть не
может, он был бы равен нулю, так как материал магнитопровода без потерь,
воздушного зазора нет. Реальный ток статора Is или в нашем случае ток намагничивания ![]() определится характерной для магнитных
цепей с железным сердечником кривой намагничивания (рис. 4.2,в). Рабочую точку
машины обычно выбирают близко к колену кривой намагничивания; при этом
материал хорошо использован, но ток холостого хода еще не очень велик. Обычно в серийных машинах ток холостого хода, определяемый в основном
током намагничивания, составляет (0,4 –
0,6) Isном.
определится характерной для магнитных
цепей с железным сердечником кривой намагничивания (рис. 4.2,в). Рабочую точку
машины обычно выбирают близко к колену кривой намагничивания; при этом
материал хорошо использован, но ток холостого хода еще не очень велик. Обычно в серийных машинах ток холостого хода, определяемый в основном
током намагничивания, составляет (0,4 –
0,6) Isном.
Таким образом, с помощью самой грубой модели мы получили самые важные представления: магнитный поток в машине определяется при w = w0 напряжением и частотой статорной цепи; ток намагничивания (ток холостого хода) определяется магнитным потоком и магнитным сопротивлением контура, по которому он замыкается.
В реальных
машинах эти принципиальные соотношения сохраняются, и ими всегда следует пользоваться как главным первым приближением, однако количественно они
несколько изменяются. В цепи (рис. 4.2, г) появится активное сопротивление фазы статора (Rs), индуктивность
рассеяния (Lss), обусловленная тем,
что не весь магнитный поток
проходит через зазор, часть замыкается по
локальным контурам.
Для того чтобы
завершить знакомство с самой простейшей моделью асинхронной машины, рассмотрим процессы
под нагрузкой, когда ![]() . Введем понятие скольжения, т.е.
относительной разности скорости
поля и ротора,
. Введем понятие скольжения, т.е.
относительной разности скорости
поля и ротора,
![]() , (4.6)
, (4.6)
и обнаружим, что
![]() ,
(4.7)
,
(4.7)
где fr – частота ЭДС и тока в роторной цепи.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.